Sintetički otvor antene. Nelinearni radar sa antenom sa sintetičkim otvorom. Odlomak koji karakterizira sintezu radarskog otvora
Metode reverzne (inverzne) sinteze otvora
Kada koristite jednu antenu za prenos

Isto je predviđeno
rezolucija, kao kod sintetiziranja otvora zbog pomicanja antene radarskog primopredajnika:
![]() , koji daje kutnu rezoluciju
, koji daje kutnu rezoluciju
Metode sinteze zasnovane na korištenju kretanja i (ili) rotacije mete nazivaju se reverzna (inverzna) sinteza. Tipični primjeri upotrebe reverzne sinteze su:
dobivanje radarskih portreta pomorskih ciljeva (brodova) korištenjem njihovog nagiba i skretanja;
prepoznavanje grupnih vazdušnih ciljeva;
procjena EPR ciljnih elemenata riješenih zbog njihove rotacije na postolju itd.
Razmotrimo radarski signal putanje sa sintezom inverzne blende. Faza i kašnjenje signala putanje kao glavni izvori informacija o meti određuju se promjenom udaljenosti do elemenata cilja u procesu sinteze otvora blende. Općenito, udaljenost se mijenja zbog pomicanja mete u odnosu na radar i rotacije mete. U ovom slučaju, meta se može istovremeno rotirati u različitim ravninama s različitim kutnim brzinama.
Radijalna brzina cilja u smjeru radara.

I Doplerova frekvencija
![]() , isključujući početnu fazu
, isključujući početnu fazu

Nastaje radijalnim pomicanjem svih elemenata cilja istovremeno u odnosu na radar. Obično se ova frekvencija u signalu procjenjuje i kompenzira.
Nastaje kao rezultat linearnog
u odnosu na centar rotacije mete. Rezolucija ciljnih elemenata za frekventnu modulaciju signala trajektorije sa malom veličinom sinteze otvora je mala. Stoga se rezolucija dometa osigurava modulacijom sondirajućeg signala. U ovom slučaju, u algoritmu obrade signala trajektorije potrebno je uzeti u obzir promjene i frekvencije signala i njegovog kašnjenja.
bit će vezani sljedećim uslovom
![]() (8.59)
(8.59)
Koordinata
Metode inverzne sinteze primijenjene na radarima za mjerenje zemljišta karakteriziraju sljedeće glavne karakteristike:
meta se kreće kao jedan objekat, tj. pojedinačni elementi mete kreću se duž međusobno povezanih putanja;
kada se posmatraju pojedinačni objekti, kao što su brodovi, veličina vidnog područja određena je veličinom objekta;
ugaona koordinatna rezolucija je određena uglom rotacije mete u odnosu na pravac na radaru tokom vremena sinteze;
ugaona veličina otvora obično ne prelazi deset stepeni, jer je u ovom slučaju već postignuta rezolucija reda nekoliko talasnih dužina;
Rezolucija dometa je osigurana, kao i kod direktne sinteze, modulacijom sondirajućeg signala;
parametri signala putanje određeni su parametrima kretanja mete (vektori linearne i ugaone brzine), koji su u većini slučajeva nepoznati posmatraču. To zahtijeva obradu signala putanje koji je prilagodljiv parametrima kretanja mete i veliku količinu apriornih informacija o meti.
Doplerov opseg frekvencije signala putanje i, prema tome, potrebna stopa ponavljanja sondirajućih impulsa određuju se veličinom cilja (područja gledanja) u azimutu:
Nastao istovremenim kretanjem mete u različitim ravnima, nije okomit na pravac posmatranja. Zatim vektor brzine
Azimutska skala slike mete, kao i ranije, određena je ugaonom brzinom rotacije mete
![]() (8.61)
(8.61)

Primjena metode inverzne sinteze u geodetskom radaru. U radaru za mjerenje zemljišta, ova metoda se koristi za dobivanje slika morskih ciljeva (brodova). Omogućuje postizanje visoke rezolucije u prednjem SAR području gledanja, budući da je potrebna kutna veličina sintetiziranog otvora osigurana vlastitim kretanjem broda (kretanjem i rotacijom). Osim toga, sinteza inverzne blende omogućava postizanje visoke rezolucije ne samo u ravnini raspon-azimut, već iu ravnini domet-elevacija. U odnosu na promatranje brodova, to omogućava dobijanje slike vertikalne konture brodskih nadgradnji, što je posebno važno pri rješavanju problema prepoznavanja morskih ciljeva.
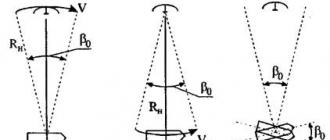
Istovremeno sa kretanjem duž kursa tokom nemirnog mora, brod također doživljava vibracije trupa oko centra mase. Za probleme inverzne sinteze obično se koriste skretanje, nagib i prevrtanje broda. Zakretanje duž kursa (slika 8.23, a) odgovara rotaciji broda u odnosu na vertikalnu os. Nagib (naizmjenični trim na pramcu i krmi) odgovara rotaciji broda u odnosu na poprečnu horizontalnu os (slika 8.23.6). Naizmjenični kotrljaj (roll) na lijevu i desnu stranu odgovara rotaciji broda u odnosu na uzdužnu horizontalnu os (slika 8.23, c). Na sl. 8.23 sve ose rotacije su okomite na ravan crteža.

Rotacija broda (kotrljanje, skretanje) je periodična, tj. Ugao odstupanja broda od ravnotežnog (normalnog) položaja mijenja se u skladu sa harmonijskim zakonom:
Period oscilovanja. Ugaona brzina rotacije se mijenja prema harmonijskom zakonu:
Maksimalna vrijednost brzine
se postiže u trenutku kada brod prođe kroz ravnotežni (kao u odsustvu uzburkanog mora) položaj broda.
Određuje ga mnogo faktora: visina valova, smjer valova u odnosu na tok broda, brzina kretanja i dizajn broda. Veliki brod kao oscilatorni sistem je ekvivalentan uskopojasnom filteru, a parametri njegovih oscilacija (amplituda i period) se mogu smatrati konstantnim tokom vremena sinteze reda djelića sekundi sa smanjenjem pomaka broda (manje od 1000 tona), amplituda i period odstupanja već zavise od karakteristika morskih talasa i slučajnog su karaktera. Općenito se vjeruje da je ugao p uskopojasni normalan proces.
U tabeli 8.3 daje procijenjene vrijednosti vibracijskih karakteristika brodova različitih tipova na morskim valovima od 5-6 bodova.


Ako je vidna linija broda okomita na os ugaonih vibracija (rotacije), moguće je dobiti slike broda u različitim ravnima. Pitching daje sliku duž broda i njegovih nadgradnji, roll motion daje sliku u bočnom smjeru broda i nadgradnje, skretanje daje sliku broda u horizontalnoj ravni. Kretanje broda konstantnom brzinom i smjerom je ekvivalentno kretanju radara kada brod miruje i daje sliku u horizontalnoj ravni. U realnoj situaciji, sve vrste vibracija broda postoje istovremeno, što otežava određivanje položaja ravni slike u odnosu na brod. Istovremeno, posmatrajući dinamičku sliku broda, tj. Slika koja se mijenja u zavisnosti od faze oscilacija broda tokom sinteze može efikasno prepoznati njegovu klasu.
Udaljenosti
od nadgradnje na visini b do radara (sl. 8.24) određeno je izrazom
gdje je b visina elementa nadgradnje, mjerena od ose rotacije broda.
(u radijanima), promjena udaljenosti do radara i, prema tome, faza reflektiranog signala može se predstaviti kao

Kroz nulu, kada je kutna brzina odstupanja maksimalna (vidi 8.64):

Ona se neznatno mijenja i svaki element nadgradnje ima svoju Doplerovu frekvenciju po visini.
tokom sinteze
dobiti dozvolu za visinu nadgradnje broda
Algoritam obrade signala se svodi na Doplerovo filtriranje u svakom elementu rezolucije kosog opsega. Dobijene zavisnosti važe i za nagib broda i radarsko osmatranje u prednjem radarskom osmatračkom području na suprotnim kursevima aviona nosača SAR i broda (sl. 8.25). Rezolucija u Doplerovoj frekvenciji u ovom slučaju odgovara rezoluciji u visini nadgradnje b, a rezolucija u kašnjenju sondirajućeg impulsa odgovara rezoluciji duž broda.

Kako se vrijeme sinteze povećava, promjene Doplerove frekvencije i kašnjenja signala počinju utjecati, što se mora uzeti u obzir u algoritmu obrade. Maksimalna rezolucija bez uzimanja u obzir promjena kašnjenja i frekvencije ograničena je na (8.59)
Uz konstantno vrijeme sinteze, rezolucija će se pogoršati.
može se dobiti mjerenjem karakteristika signala u svakom doplerovom kanalu na izlazu monopulsne antene.
Pojednostavljeni blok dijagram SAR-a za reverznu sintezu za pomorske ciljeve prikazan je na Sl. 8.26. Antenski sistem formira tri prostorna prijemna kanala: zbirni i dva diferencijalna (u horizontalnoj i vertikalnoj ravni). Nakon konverzije na međufrekvenciji, primljeni signali se pretvaraju u digitalne signale pomoću faznih detektora i ADC-a. Sistem za praćenje frekvencije određuje prosječnu Doplerovu frekvenciju primljenih signala i njenu promjenu za kompenzaciju tokom obrade signala (autofokus), a također mjeri promjenu kašnjenja omotača signala za kompenzaciju tokom sinteze otvora blende. Sistem za mjerenje vektora ugaone brzine rotacije (oscilacije) broda omogućava određivanje razmjera i orijentacije u prostoru slike broda.


Kretanje mete, kao i kretanje nosača radara, stvara efekat sintetiziranja otvora čija je kutna veličina određena međusobnim kutnim pomicanjem radara i cilja. Pokažimo to na primjeru rješavanja elemenata grupne mete (slika 8.27), koja se sastoji od dva sinhrono pokretna mala objekta (tačkaste mete).
Doplerova frekvencija se mijenja tako da je frekvencijska razlika između dvije mete koje se kreću istom brzinom
U skladu s tim, tangencijalne komponente brzine radara i ciljeva.

![]() - ugaona brzina rotacije linije nišana
- ugaona brzina rotacije linije nišana
Radar je meta.
Algoritam za obradu signala putanje prilikom posmatranja grupnog cilja određen je faznom strukturom signala, koja opet zavisi od međusobnog kretanja (putanja) radara i ciljeva.
Za ravne putanje i konstantne brzine, relativna udaljenost između radara i mete (vidi sliku 8.27)
Fazna funkcija signala putanje (bez uzimanja u obzir beznačajne početne faze)
Shodno tome, Doplerova frekvencija signala putanje
Za cilj pomaknut za ugao A 6 , Doplerova frekvencija signala putanje
Općenito, nepoznato, potrebno
sistem za obradu koji je prilagodljiv ovim parametrima, na primjer koristeći autofokus.
![]() Tokom energičnih manevara aviona
Tokom energičnih manevara aviona
cm, vrijeme sinteze može varirati od 0,5 do 0,05 s. Uz prilagodljivu obradu kao što je autofokus, ovo vrijeme se može značajno povećati.
OBRADA I KONTROLA INFORMACIJA X
UDK 621.396.96
PRAVCI RAZVOJA RADARA ZA SINTEZIJU U SVEMIRU
O. L. Polonchik,
dr.sc. tech. nauka, vanredni profesor
Sjeverni (arktički) federalni univerzitet nazvan po. M. V. Lomonosova, Arhangelsk
Analiziraju se glavni pravci razvoja svemirskih radarskih sistema za praćenje zemljine površine. Definisana je predmetna oblast upotrebe radarskih tehničkih sredstava, uključujući i za rešavanje primenjenih problema ekonomskog razvoja severnih i arktičkih regiona Rusije. Izvršena je komparativna procjena postojećih metoda sagledavanja zemljine površine. Predložena je nova metoda za konstrukciju radarskih sistema na brodu zasnovanih na svemirskim letjelicama stabilizovanim rotacijom. Razmatraju se načini poboljšanja tehničkih karakteristika radara u zraku.
Ključne riječi - bočni radar, dijagram zračenja, mehaničko skeniranje, sinteza otvora.
Uvod
Moderna vazdušna radarska oprema predstavlja jedno od oblasti radioelektronske tehnologije koje se najbrže razvija. Posebno mjesto među njima zauzimaju radari sa sintetičkim otvorom u zraku. Ova tehnička sredstva vrše sondiranje zemljine površine u bilo koje doba dana, sezone i godine, ne zavise od klimatskih uslova i prisustva oblaka, što je posebno važno za područja sa malim brojem sunčanih dana u godini. U Ruskoj Federaciji to uključuje ogromna područja na sjeveru zemlje i na Arktiku, koja čine gotovo trećinu teritorije naše države, vrlo bogata raznim mineralima, naftom i plinom.
Rješavanje najvažnijih nacionalnih ekonomskih problema, kao što su visokoprecizna procjena terena, formiranje trodimenzionalnih slika zemljine površine i proučavanje dinamičkih procesa na površini zemlje i mora, povjereno je perspektivnim sredstvima. daljinskog istraživanja Zemlje.
Za rješavanje problema održivog razvoja sjevernih i arktičkih regija posebno je relevantna nabavka radarskih materijala visokih mjernih svojstava, koji osiguravaju izradu i ažuriranje državnih topografskih karata,
planove i kartografske osnove državnog katastra nepokretnosti.
Pribavljanje informacija o stanju ovih područja je zadatak od izuzetnog značaja i pomoći će da se materijalni gubici minimiziraju.
Istorija razvoja radarskog daljinskog otkrivanja Zemlje
Razvoj vazdušnih radarskih stanica (radara) doveo je do stvaranja svestranih radarskih sistema, čiji je glavni nedostatak bila niska rezolucija. Dalja istraživanja u cilju poboljšanja radara za istraživanje Zemljine površine bila su usmjerena na prevazilaženje glavnog ograničenja u povećanju rezolucije povezanog s veličinom antenskih uređaja.
Detalj radarske slike ovisi o linearnoj rezoluciji (rezoluciji dometa) radara, koja je u radijalnom smjeru određena sondirajućim signalom, u poprečnom smjeru (tangencijalna rezolucija) - širinom uzorka zračenja (DP) i udaljenost do mete.
Problem povećanja rezolucije dometa rješava se korištenjem zvučnih signala kratkog trajanja impulsa.
Zrakoplov
impulsi ili prijelaz na složene signale - frekvencijsko modulirani ili fazni pomak.
Povećanje tangencijalne rezolucije postiže se upotrebom antene u radaru na brodu koji se nalazi duž trupa aviona, ili sintetiziranjem otvora antene dok se avion kreće.
Prvi put doveo je do razvoja radara za bočno skeniranje. Dijagram implementacije metode prikazan je na Sl. 1. Kod ovakvih radara, što je veća uzdužna veličina trupa aviona, veća je tangencijalna rezolucija, iako ostaje zavisnost od dometa.
Rezolucija ovog tipa radara povećana je za otprilike 10 puta u odnosu na panoramske radare sa svih strana. Pa ipak, po svojim mogućnostima, ove stanice su još uvijek znatno inferiornije od optičkih uređaja.
Drugi, radikalniji način je stvaranje radara sa sintetičkim otvorom (SAR) tokom kretanja aviona naprijed.
Ogroman doprinos razvoju teorije SAR-a dali su poznati domaći naučnici A. P. Reutov, G. S. Kondratenkov, P. I. Dudnik, Yu L. Feoktistov, N. I. Burenjin, V. A. Potekhin i dr.
Radari sa sintetičkim otvorom blende
Suština metode je emisija radara instaliranog na mobilnom nosaču (zrakoplov, svemirska letjelica (SC) ili bespilotna letjelica), koherentni zvučni signali, prijem odgovarajućih reflektiranih signala duž pravolinijske putanje leta nosača, njihovo skladištenje i dodatak. Kao rezultat dodavanja prihvaćenog
signala, antenski snop je komprimiran i rezolucija radara duž linije putanje nosioca je značajno povećana.
U zavisnosti od toga da li se fazni pomaci kompenzuju ili ne prilikom sumiranja signala, razlikuju se fokusirani i nefokusirani SAR. U prvom slučaju, obrada se svodi na pomicanje antene, pohranjivanje signala, kompenzaciju faznih pomaka i zbrajanje signala, u drugom - na iste operacije, ali bez kompenzacije faznih pomaka.
Potencijalna rezolucija takvih stanica približava se karakteristikama opreme za optički nadzor. Ovi radari omogućavaju realizaciju visoke linearne rezolucije, nezavisno od opsega posmatranja i talasne dužine sondirajućeg signala.
Trenutno postoje tri glavna načina snimanja zemljine površine (slika 2): ruta, pregled i reflektor (detaljno).
Savremeni sistemi omogućavaju dobijanje slika zemljine površine i objekata koji se nalaze na njoj sa rezolucijama od oko 1 m za režime snimanja i 0,3 m za režime reflektora. Primenjene metode digitalne obrade primljenog signala imaju značajan uticaj na rezultujuće SAR karakteristike.
U režimu rute, Zemljina površina se kontinuirano fotografiše u zoni snimanja. Signal se akumulira u vremenskom periodu koji je jednak izračunatom intervalu sinteze otvora antene za date uslove leta radarskog nosača.
Pregledni način snimanja razlikuje se od režima snimanja na ruti po tome što se snimanje kontinuirano izvodi po cijeloj širini otkosa u prugama jednakim širini zahvata. Šest greda se uzastopno mijenja po visini kako bi se pregledao cijeli otkos (slika 3).
Lateralni i anterolateralni modus se dijele ovisno o orijentaciji glavnog režnja
Reflektor
Antenski uzorak. Signal se akumulira u vremenskom periodu koji je jednak izračunatom intervalu za sintezu otvora antene za date uslove leta nosača radara.
Kada snimate u režimu reflektora, akumulacija signala se dešava u većem intervalu u poređenju sa režimom pregleda. Proširenje intervala postiže se pomicanjem glavnog režnja antenskog dijagrama, a ozračeno područje se stalno nalazi u području snimanja. Ovo kretanje je sinhronizovano sa kretanjem nosača radara.
Da bi se tačka uzorka zadržala na istoj površini, četiri snopa se uzastopno mijenjaju po azimutu (slika 4).
Dakle, analiza glavnih načina snimanja zemljine površine metodom SAR pokazuje da:
1) kod metode bočnog pogleda, maksimalna širina trake donje površine koja se posmatra je slična širini gledanja;
2) povećanje linearne rezolucije u režimu reflektora postiže se povećanjem otvora blende, dok se posmatrani pojas sužava;
3) povećanje linearne rezolucije u načinu snimanja vrši se korištenjem skupa visoko ciljanih obrazaca.
Minimalna linearna rezolucija azimuta 8hš1p za antene s nefokusiranim umjetnim otvorom određena je relacijom
Rezolucija linearnog azimuta radara sa fokusiranim umjetnim otvorom je određena izrazom
5h - ©R0 - ^,
gdje je ya veličina otvora antene u datoj ravni.
Radar sa fokusiranim veštačkim otvorom omogućava, za razliku od nefokusiranog, dobijanje linearne rezolucije po azimutu, nezavisno od opsega i talasne dužine sondirajućeg signala. Rezolucija takvih radara raste kako se veličina stvarne antene smanjuje. Ovo je značajna prednost SAR-a u odnosu na druge metode otkrivanja zemljine površine.
Radari za bočno skeniranje. Osnovni odnosi
Određivanje lokacije cilja tokom bočnog pogleda vrši se u koordinatnom sistemu: domet staze x, nagnuti domet R.
Kada se gleda sa strane, dijagram antene je okomit na vektor zemaljske brzine nosača. Određivanje položaja ciljeva na tlu vrši se u pravougaonom koordinatnom sistemu xY. Područje gledanja je traka paralelna sa putanjom leta nosača (slika 5, a). Širina pojasa je određena dometom radara.
Moguće je orijentisati dijagram antene pod uglom u odnosu na vektor brzine na zemlji različit od l/2.
■ Sl. 4. Režim reflektora
■ Sl. 5. Dijagram bočnog pogleda u pravougaonom (a) i kosom (b) koordinatnom sistemu
Istovremeno, vidno polje se sužava, ciljevi se mogu detektovati proaktivno (slika 5, b). U ovom slučaju teren se snima u kosom koordinatnom sistemu.
Poznato je da se rezolucija radara za posmatranje zemljine površine u horizontalnom opsegu direktno ispod nosača pogoršava u poređenju sa granicom određenom trajanjem sondirajućeg impulsa. Stoga se visina leta nosača obično uzima kao najbliža granica pojasa, gdje se rezolucija dometa neznatno pogoršava.
Metoda je opisana sljedećim karakteristikama:
Vrijeme zračenja;
Domet radarske detekcije;
Rezolucija.
Vrijeme ozračivanja
Ttyo _ Š ’
gdje je © ugaona širina dijagrama radarske antene u horizontalnoj ravni; W - projekcija brzine duž pravca putanje.
Karakteristična karakteristika metode bočnog pogleda je jednokratno zračenje meta. Kada je pravac posmatranja okomit na vektor prizemne brzine, slika se formira samo iznad putanje leta.
Druga karakteristika je povećanje vremena ciljanog zračenja proporcionalno opsegu. To dovodi do činjenice da se energija signala reflektiranih od ciljeva povećava sa povećanjem dometa cilja.
Odredimo domet radarske detekcije za slučaj bočnog skeniranja.
Poznato je da domet detekcije cilja (pozadina terena) D0 sa efektivnom reflektivnom površinom st pri upotrebi jedne primopredajne antene ima oblik
64l k0kGots
gdje je E ciljna energija zračenja; b - koeficijent usmjerenosti antene; X je talasna dužina radarskog predajnika; £š - broj buke prijemnog uređaja; £ - Boltzmannova konstanta; T0 - apsolutna temperatura (obično 280 K); "L = Es tt/^sh je potrebna vrijednost koeficijenta uočljivosti radarskog prijemnog uređaja. Ovdje je Es t1n granična vrijednost energije primljenog reflektovanog signala, koja karakterizira osjetljivost radarskog prijemnog uređaja; Ysh je spektralna gustina šuma na ulazu prijemnika: Ysh = £sh £ T0.
Energija zračenja mete (elementa terena) određena je relacijom
V - £Pe^tayo>
gdje je Rsr prosječna snaga emitovanog signala.
Uzimajući u obzir odnos za ciljnu energiju zračenja, dobijamo formulu za raspon u metodi bočnog pogleda
Rpa©0S2stH2
64l 1Ak0k7O"p
Analiza izraza pokazuje da je moguće povećati radni opseg razmatrane metode u odnosu na sveobuhvatnu vidljivost.
Svestrani radar sa sintetičkim otvorom na bazi svemirskog broda sa stabilizacijom rotacije. Osnovni odnosi
Za implementaciju ove metode posmatranja zemljine površine potrebni su svemirski brod sa stabilizacijom rotacije i radar sa paraboličnom antenom. Dijagram antene ima ugao nagiba u odnosu na lokalnu vertikalu.
Radarska antena, zbog kružne rotacije tijela svemirske letjelice za koju je čvrsto pričvršćena, skenira donju površinu zemlje. Projekcija dijagrama antene u azimutalnoj i elevacionoj ravni na površinu zemlje prikazana je na sl. 6 i 7.
Energija radara u metodi je bolja u odnosu na SAR, jer se koristi uži dijagram snopa pristrasne antene. Određuje se odabirom minimalnog i maksimalnog ugla elevacije dijagrama antene.
Razmotrimo položaj radarske antene u različito vrijeme (slika 8). Antena na
Antenska projekcija
■ Sl. 6. Pogled na projekcije dijagrama radarske antene na zemljinu površinu u azimutalnoj ravni: Oa je ugaona brzina rotacije radarske antene svemirskog broda u azimutalnoj ravni; Yatah - maksimalna udaljenost do cilja C^ V - brzina letjelice
■ Sl. 7. Pregledanje pojasa radarske antene svemirske letjelice
■ Sl. 8. Položaji radarske antene svemirske letjelice u ravni rotacije u različito vrijeme, uzimajući u obzir translacijsko kretanje i rotaciju: I - udaljenost koju letjelica leti tokom pola perioda rotacije
rotacija oko lokalne vertikale, uzimajući u obzir brzinu tla, uzastopno zauzima ove pozicije (tačke 1, 2, 3, itd.). Radijus rotacije antene je beznačajan (reda nekoliko metara). Svemirska letjelica se kreće prvom brzinom bijega, a kriva kretanja antene pretvara se gotovo u pravu liniju u vremenskom intervalu jednakom polovini perioda rotacije.
U svakoj tački na ovoj krivulji električna os antene će biti okomita na nju. Postaje moguće sintetizirati umjetni otvor.
Lokacija je definirana u polarnom koordinatnom sistemu. Mjere se opseg R i azimut ß. Određuje se visina leta H i ugao elevacije y. Azimut cilja se mjeri iz smjera kretanja (vidi sliku 6).
Radarski nadzor se vrši u određenom prostoru prostora, koji se naziva radni prostor, odnosno radarski prostor za posmatranje. Dimenzije radnog prostora određene su intervalima gledanja u smislu raspona Rmax - Rmin, azimuta "max - amin, elevacionog ugla ßmax - ßmin i radijalne brzine Vr max - Vr min. Dužina svakog specificiranog intervala određena je brojem radarskih rezolucijskih elemenata koji sadrži duž odgovarajuće koordinate.
Informacija o prisustvu ciljeva u različitim elementima rezolucije radnog područja dobija se tokom pregleda (pregleda) ovih elemenata. Redosled i vreme posmatranja različitih elemenata, kao i intenzitet signala koje radar emituje pri posmatranju svakog elementa, određuju se metodom (programom) koji se koristi za posmatranje radnog prostora.
Pregled elemenata radnog područja može se vršiti uzastopno u vremenu ili istovremeno.
Uzastopnim pregledom ne može se uvijek osigurati potrebna brzina dobivanja informacija o prisutnosti i koordinatama ciljeva u zoni posmatranja. To je zbog činjenice da ciljno vrijeme ozračivanja T mora premašiti maksimalno vrijeme kašnjenja signala tmax:
T> "^provjera 2^provjera / s
gdje je Yatah maksimalni domet radara; c je brzina svjetlosti.
Vrijeme za jedan pregled cijele zone T0 mora zadovoljiti uvjet
T0 - T^a, p > (2^Shax / c)^a, p,
gdje je Na p broj elemenata usmjerene rezolucije.
U sveobuhvatnom gledanju sa sintetičkim otvorom blende, mora se ispuniti određeni omjer
T - 2l/Oa.
Broj impulsa koje meta reflektuje tokom ovog vremena biće
P - Š - ©Gë/Oa,
gdje je stopa ponavljanja pulsa u rafalu.
Period pregleda radnog područja određuje stopu prijema informacije o prisutnosti mete u zoni i ne može preći određenu dozvoljenu vrijednost T0 max. Ako je ova vrijednost data, onda
Oa - 2l / ^Oshakh.
Ovaj odnos određuje minimalnu ugaonu brzinu rotacije dijagrama radarske antene tokom sveobuhvatnog posmatranja sa sintetičkim otvorom.
Odabirom brzine rotacije može se sagledati zemljina površina bez praznina.
Glavne karakteristike kružne metode gledanja sa sintetičkim otvorom blende:
Ciljno vrijeme ozračivanja;
Period pregleda i broj ciklusa pregleda po cilju.
Poređenje metode kružnog gledanja sa sintezom otvora s drugim metodama omogućava nam da izvučemo sljedeće zaključke.
1. Skeniranje dijagrama prijemne antene osigurava pregled cijele zemlje ispod
površina bez praznina. U ovom slučaju, ugaona rezolucija rezultirajuće slike biće uporediva sa rezolucijom SAR u režimu reflektora.
2. Vrijeme zračenja je praktično nezavisno od ciljanog raspona.
3. Pregled donje zemljine površine tokom jednog perioda rotacije se dešava dva puta i zavisi od ugaone brzine, koja određuje broj ciklusa.
4. Energija radara je znatno veća u odnosu na SAR metodu, jer se koristi uži uzorak. Cilj (element terena) se nalazi u pravcu posmatranja okomito na vektor ugaone brzine.
5. Odabirom ugla nagiba antene isključuje se horizontalni pogled na površinu zemlje
1. Sollogub A.V. et al. 2012. br. 5(60). str. 24-28.
2. Verba V. S., Neronsky L. B., Osipov I. G., Turuk V. E. Svemirski radarski sistemi za premjeravanje zemljišta / ur. V. S. Verba. - M.: Radiotehnika, 2010. - 680 str.
3. Vinogradov M. Mogućnosti modernih radara sa sintezom otvora antene // Foreign Military Review. 2009. br. 2. str. 52-56.
domet direktno ispod nosača, gdje je rezolucija radara izuzetno niska.
Zaključak
U radu se ispituju glavni pravci razvoja svemirskih radarskih sistema za praćenje zemljine površine i istorijat nastanka ovih sredstava. Analiziraju se postojeće metode i vrši se uporedna procjena glavnih tehničkih karakteristika. Predložena je metoda za sintezu otvora zasnovana na kružnom kretanju prijemne antene pomoću svemirske letjelice stabilizovane rotacijom. Identificirani su načini za poboljšanje tehničkih karakteristika ugrađenog radara za rješavanje primijenjenih problema.
4. Sesin A. E., Shepeta D. A. Matematički model eho signala morske površine promatranih lokatorima zrakoplova na brodu // Informacijski i upravljački sustavi. 2010. br. 2. str. 21-25.
5. Zakharova L.N. et al. Zajednička analiza podataka optičkih i radarskih senzora: mogućnosti, ograničenja i izgledi 2011. T. 56. br. 1. str. 5-19.
Problem radikalnog povećanja rezolucije u smjeru okomitom na donju os posebno je relevantan za radarski nadzor površine ispod zrakoplova ili svemirskog broda, jer je vrlo visoka rezolucija dostižna u smjeru donje ose uz odgovarajuće proširenje radara. spektar signala. Ako se zračenje antene usmjeri okomito na vektor brzine radara, odnosno izvrši se bočni pogled, tada pomicanje antene u odnosu na ozračenu površinu omogućava da se uz optimalnu obradu reflektiranih signala dobije vrlo visoka rezolucija u smjer okomit na donju osu. Ovo rješava problem dobivanja radarske slike visoke definicije.
Povećanje rezolucije tokom pogleda sa strane može se smatrati rezultatom kompresije zraka uz optimalnu obradu (slično kompresiji impulsa s unutarpulsnom modulacijom) ili kao formiranje uzorka od strane sintetiziranog antenskog niza formiranog kada se radarska antena pomjera relativno na ozračenu površinu.
Razmotrimo princip rada i potencijalne mogućnosti radara sa strane aviona. Antena stanice je produžena duž ose aviona i formira dno, usko u horizontalnoj i široko u vertikalnoj ravni, orijentisano okomito na osu aviona. Obično se stvaraju dva identična dna sa obe strane ose aviona, što u ovom slučaju nije značajno.
S obzirom na talasnu dužinu emitovanih oscilacija radara i uzdužnu veličinu antene, širina dna u horizontalnoj ravni je . Radi jednostavnosti, s obzirom da je zračenje ograničeno u horizontalnoj ravni kutom , naći ćemo vrijeme ozračivanja površinske točke na udaljenosti D od radara:
gdje je brzina aviona, koja se smatra konstantnom; - linearna širina dna na udaljenosti D od radara. Radijalna komponenta brzine u odnosu na tačke ozračene površine (Sl. 18.7, a), gdje je ugao između ose dna u horizontalnoj ravni i smjera do tačke o kojoj je riječ. Tako na osi dna, a na rubovima dostiže svoju maksimalnu vrijednost. Budući da radari za bočni pogled koriste uske donje zrake, može se smatrati . Zbog radijalne komponente brzine dolazi do doplerovog pomaka frekvencije reflektovanog signala, koji se linearno mijenja od do . Dakle, kada se leti na daljinu, prima se frekvencijski modulirani impuls trajanja (slika 18.7b) sa devijacijom frekvencije.
Uz optimalno usklađenu obradu, takav impuls se može komprimirati u impuls s trajanjem inverznim širini spektra signala i približno jednakim . Dakle, . Od tada. Imajte na umu da na izlazu filtera kompresije, omotač impulsa ima oblik i njegovo trajanje (mjereno na nivou od 0,64 maksimalne vrijednosti) određuje maksimalnu vremensku rezoluciju, koja odgovara udaljenosti razriješenoj u smjeru vektora V. , okomito na osu mete.
Stoga, uz koherentnu obradu, razlučena udaljenost ne ovisi o rasponu i ograničena je na vrijednost jednaku . Ovaj zaključak, koji se na prvi pogled čini paradoksalnim, postaje jasan kada se analizira rezolucija radara za bočni pogled sa stanovišta sinteze otvora blende.
Ako se svi reflektirani signali zbroje koherentno (tj. uzimajući u obzir fazu), tada je moguće formirati (sintetizirati) snop širine
pri čemu koeficijent 2 uzima u obzir fazni pomak kada signal pređe razdaljinu D "naprijed i naprijed".
Dozvoljena udaljenost u smjeru leta (okomito na donju os)
Segment putanje L, na kojem se vrši koherentno zbrajanje reflektovanih signala, određuje veličinu sintetizovanog otvora, budući da je takvo sumiranje slično prijemu signala na niskofaznoj anteni sa veličinom otvora jednakom . Odavde postaje jasno zašto se razlučena udaljenost smanjuje, tj. rezolucija raste kako se otvor stvarne antene smanjuje i ne ovisi o D. To se objašnjava povećanjem sintetiziranog otvora u direktnoj proporciji sa širinom radara. dno i opseg tačke koja se razmatra.
Međutim, sa povećanjem, povećavaju se i poteškoće u osiguravanju koherentnosti u obradi signala. Stoga, da bi se dobile male vrijednosti, radarske antene sa bočnim skeniranjem moraju imati značajne veličine otvora, što omogućava implementaciju koherentne obrade koja daje aproksimaciju potencijalne rezolucije sistema sa sintetiziranim otvorom, određenom formulom (18.27) .
Prilikom prelaska sa kontinuiranog signala na impulsni signal s periodom, sintetizirana antena je slična antenskom nizu, čiji su razmaci između elemenata jednaki. Radari koji gledaju sa strane obično koriste pulsno zračenje, zbog čega se takvi radari nazivaju radarima sa sintetičkim nizom.
Emisijom svakog impulsa, radarska antena postaje element sintetizovanog niza, čija je udaljenost od tačke površine koja se razmatra jednaka najkraćem rastojanju (Sl. 18.7, a) samo u trenutku kada je ta tačka u pitanju. se pojavljuje na donjoj osi. Na rubovima sintetizirane rešetke, udaljenost se razlikuje od

Ova razlika udaljenosti odgovara maksimalnom osnovnom kašnjenju signala. Ako se za vrijeme promjene leta zabilježe kašnjenja faze i uzmu u obzir tokom obrade, tada se sintetizirane rešetke nazivaju fokusiranim. Sistem obrade signala u ovom slučaju se ispostavlja složenim, pa je potrebno otkriti kakav gubitak rezolucije nastaje zbog odbijanja "fokusiranja", odnosno prijelaza na nefokusiranu obradu bez uzimanja u obzir faznih pomaka. U ovom slučaju je prihvatljiva razlika poteza na krajevima sintetiziranog otvora, što odgovara maksimalnom faznom pomaku. Iz ovog uslova se može naći veličina efektivnog otvora sintetizovane antene. Od sl. 18.7, jasno je da i, prema tome,
![]()
Dakle, u nedostatku fokusiranja, širina snopa sintetiziranog otvora je veličine , a odgovarajuća linearna rezolucija
Za obradu signala bez korekcije (fokusiranja), prikladan je konvencionalni eksponencijalni akumulator s linijom kašnjenja za period ponavljanja impulsa. Jasno je da su se nazivi fokusirani i fokusirani sistemi pojavili po analogiji sa optičkim sistemom u kojem, sa potpuno otvorenim otvorom blende, objektiv mora biti fokusiran (fokusiranje).
Sa jakim otvorom blende, dovoljna jasnoća (oštrina) je osigurana bez fokusiranja kada je objektiv stalno postavljen na beskonačnost.
Shodno tome, uz fokusiranu obradu signala (fokusirani otvor blende), maksimalna linearna rezolucija u smjeru okomitom na dijagram snopa je dostižna, bez obzira na raspon s nefokusiranom obradom (nefokusirani otvor blende) za konvencionalnu antenu s rezolucijom veličine otvora.
Ovisnost rezolucije o opsegu D za ove slučajeve prikazana je na Sl. 18.8.
Dakle, da bi se u potpunosti ostvarile potencijalne mogućnosti sintetizovane antene, potrebno je obraditi signal sa faznim korekcijama u skladu sa položajem tačke koja se razmatra u odnosu na radarsku antenu. U pulsnim radarima, signal se ponavlja sa periodom, a korekcije se uvode diskretno u vremenima mjerenim od vremena prijema prosječnog impulsa reflektiranog u trenutku kada se data tačka nalazi na traverzi letećeg zrakoplova.
Usklađeni filter za signal ciljane tačke sa poznatim dometom i brzinom radara u odnosu na metu odgovara koherentnom filtarskom krugu za nalet impulsa, sa amplitudama impulsa pomnoženim težinskim koeficijentima i fazom pomerenom za vrednost korekcije. Takva obrada (fokusiranje) je potrebna za svaki element dometa, odnosno potreban je filter za svaki raspon (diskretnost ovisi o rezoluciji raspona koja je određena širinom spektra signala), a parametri filtera se moraju mijenjati kada se brzina kretanja radara mijenja.

Zahtjevi za uređaj za obradu specificirani su prvenstveno vremenom sinteze, koje je jednako u fokusiranim sistemima. Dakle, pri brzini aviona, datoj rezoluciji dometa kada radar radi na valu, potrebna veličina sintetiziranog otvora je . U ovom slučaju . Pri brzini ponavljanja impulsa, broj signala zbrojenih tokom obrade za svaki element opsega, čiji broj u rasponu raspona može doseći . Broj nivoa kvantizacije određuje dubinu bita uređaja za obradu. Dakle, ukupna količina obrađenih informacija je . Ako postoje kvadraturni kanali, vrijednost se udvostručuje i iznosi 108 bita. Uzimajući u obzir faznu korekciju u svakom periodu ponavljanja, postiže se potrebna brzina obrade u takvim sistemima.
Unatoč relativnoj složenosti, moguća je digitalna implementacija uređaja za obradu koristeći modernu elementnu bazu, posebno pri obradi na video frekvencijama. Prednost digitalne obrade je mogućnost dobijanja slika terena ispod aviona ili satelita u realnom vremenu.
Ako je kašnjenje u dobivanju slike prihvatljivo (na primjer, tijekom mapiranja), tada je preporučljivo koristiti metode optičke obrade signala pri sintetiziranju otvora, budući da optički uređaji pružaju višekanalnu koherentnu obradu signala za sve elemente raspona odjednom.
Princip obrade je sljedeći. Primljeni signali se snimaju na fotografski film, povučen brzinom proporcionalnom brzini aviona V, sa linijama dometa koje se nalaze preko filma. Na određenoj udaljenosti od početka svake linije, proporcionalnoj udaljenosti razmatrane tačke D, reflektovani signali se snimaju tokom vremena snimanjem u uzdužnom pravcu (duž filma) na odgovarajućoj skali prenosi distribuciju signala duž sintetizovane; otvor blende.
Nakon razvoja (vrijeme razvoja određuje kašnjenje u obradi), film se povlači ispred prozora optičkog uređaja, pri čemu se zrači jednoličnim koherentnim svjetlosnim snopom. Ravan svjetlosni val koji prolazi kroz film je moduliran po amplitudi i fazi snimljenim signalom. Veličina mrlje dobijene na optičkom ekranu ili drugom fotografskom filmu na izlazu optičkog filtera odgovara širini dijagrama zračenja sintetizirane antene, koja je višestruko manja od širine dijagrama zračenja stvarne antene. . Odabirom parametara elemenata (leća) optičkog filtera moguće je osigurati koherentnu obradu i postići visoku jasnoću sintetizirane radarske slike. Uz pomoć radara koji gleda sa strane sa sintezom otvora koji se nalazi na umjetnom satelitu Venere, sovjetski istraživači su uspjeli dobiti jasnu radarsku sliku ove planete, zatvorene za optičko promatranje.
Vlasnici patenta RU 2397509:
Pronalazak se odnosi na oblast radiotehnike, posebno na oblast nelinearne radarske tehnologije, i može se koristiti za pretragu i detekciju objekata sa nelinearnim električnim svojstvima. Ostvareni tehnički rezultat pronalaska sastoji se u implementaciji algoritma za sintezu otvora antene u nelinearnoj radarskoj stanici (radaru) i postizanju ugaone rezolucije bliske potencijalnoj. Suština izuma je izmjeriti prosječnu brzinu kretanja i slučajna odstupanja nelinearnog radarskog nosača od date putanje duž apscise, ordinate i aplikativne osi i implementirati u svaki od kanala za obradu eho signala nelinearnog radara poznatu algoritam za sintezu otvora antene, uzimajući u obzir rezultate mjerenja. 3 ill.
Pronalazak se odnosi na oblast radiotehnike, posebno na oblast nelinearne radarske tehnologije, i može se koristiti za pretragu i detekciju objekata sa nelinearnim električnim svojstvima (OENS).
Poznat je SAR koji se sastoji od serijski spojenog antenskog uređaja, primopredajnika, faznih detektora, analogno-digitalnih pretvarača, sistema za digitalnu obradu, procesora sistema displeja, sistema indikacije, kao i sistema za snimanje i prenosnog sistema. preko širokopojasnog kanala, čiji se princip rada zasniva na formiranju velike antene sa sintetizovanim otvorom pomoću prave male antene. Istovremeno, da bi se smanjio uticaj nasumičnih prostornih odstupanja SAR nosača od date putanje (nestabilnosti putanje) na rezultate njegovog rada, koristi se sistem kompenzacije za nestabilnosti trajektorije, zasnovan na integrisanoj upotrebi dve inercijalne navigacije. sistemi - standardni inercijalni navigacioni sistem sa korekcijom od radio senzora (GLONASS, DISS ili Radar u režimu merenja brzine i ugla zanošenja) i širokopojasni inercijalni navigacioni sistem sa sistemom akcelerometara i senzora ugaone brzine (mikro-navigacija). Međutim, SAR ne dozvoljava pretraživanje i otkrivanje OENS-a, budući da se obrada eho signala sa radarskih ciljeva provodi samo na frekvenciji nosioca sondirajućeg signala (SS) ω 0.
Najbliži po tehničkoj suštini (prototip predloženom izumu) je nelinearni radar (NRLS), na primjer, koji se sastoji od predajnika, odašiljačke antene i dva identična kanala za obradu signala na frekvencijama drugog 2ω 0 i trećeg 3ω 0 harmonika ES, od kojih svaki sadrži serijski povezane prijemne antene i prijemnik, kao i uređaje za prikaz. Princip rada navigacionog radara zasniva se na prijemu signala odgovora od OENS-a na frekvencijama 2ω 0 i 3ω 0, njihovoj obradi i indikaciji nivoa. To je osigurano činjenicom da obično OENS sa poluvodičkim komponentama imaju nivo signala odziva na drugom harmoniku koji je 20-30 dB viši nego na trećem harmoniku. Za OENS kontaktnog tipa, po pravilu, važi inverzni odnos. Nedostaci nelinearnog radara su nedostatak sagledavanja uticaja nestabilnosti trajektorije na proces njegovog funkcionisanja i nepouzdanost poređenja nivoa odzivnih signala sa OENS-a na drugom i trećem harmoniku ES-a zbog jaka zavisnost promene rasute snage OENS na harmonicima ES od položaja OENS u odnosu na pravac sondiranja i harmonijski broj ES.
Problem koji treba riješiti predloženim nelinearnim radarom sa antenom sa sintetičkim otvorom je povećanje kutne rezolucije nelinearnog radara.
Tehnički rezultat pronalaska izražen je u implementaciji algoritma za sintezu otvora antene u nelinearnom radaru i postizanje ugaone rezolucije bliske potencijalnoj.
Tehnički rezultat je postignut činjenicom da se u poznatom navigacijskom radaru, koji se sastoji od predajnika, odašiljačke antene i dva identična kanala za obradu signala na frekvencijama drugog 2ω 0 i trećeg 3ω 0 harmonika Zemlje, svaki od koji sadrži prijemnu antenu i prijemnik spojene u seriju, kao i uređaje za prikaz. Dodatno su uvedeni referentni oscilator, sintisajzer frekvencije i jedinica za kompenzaciju nestabilnosti trajektorije, dizajnirane da generiraju odgovarajući signal korekcije neusklađenosti na osnovu izmjerene prosječne brzine. kretanja i slučajnih odstupanja nelinearnog radarskog nosača od zadate putanje, a u svakom od kanala se nalazi uređaj za fazni pomak, prvi i drugi fazni detektori, prvi i drugi analogno-digitalni pretvarači, kalkulator prve referentne funkcije dizajniran da formira sinusnu komponentu referentne funkcije, drugi kalkulator referentne funkcije dizajniran da formira kosinusnu komponentu referentne funkcije, sistem za digitalnu obradu dizajniran za formiranje radarske slike objekata sa nelinearnim električnim svojstvima, dok izlaz referentne funkcije oscilator je spojen na ulaz sintisajzera frekvencije i na druge ulaze prijemnika prvog i drugog kanala, prvi izlaz sintisajzera frekvencije je spojen na ulaz predajnika čiji je izlaz spojen na ulaz odašiljačke antene, drugi izlaz sintisajzera frekvencije je spojen u svakom kanalu na drugi ulaz prvog detektora faze i ulaz uređaja za pomak faze, izlaz uređaja za pomak faze svakog kanala je spojen na drugi ulaz drugog faznog detektora odgovarajućeg kanala, izlaz prijemnika svakog kanala je povezan sa prvim ulazima prvog i drugog faznog detektora odgovarajućeg kanala, čiji su izlazi povezani sa ulazima prvog i drugi analogno-digitalni pretvarači odgovarajućih kanala, čiji su izlazi u svakom kanalu povezani, odnosno na prvi i drugi ulaz sistema digitalne obrade odgovarajućeg kanala, ulazi prvog i drugog kalkulatora referentne funkcije svaki kanal je povezan na izlaz jedinice za kompenzaciju nestabilnosti trajektorije, izlazi prvog i drugog kalkulatora referentne funkcije svakog kanala su povezani na treći i četvrti ulaz sistema za digitalnu obradu odgovarajućeg kanala, izlazima digitalni procesni sistemi prvog i drugog kanala povezani su na prvi i drugi ulaz uređaja za prikaz, a jedinica za kompenzaciju nestabilnosti trajektorije sadrži generator taktnih impulsa, uređaj za skaliranje, uređaj za određivanje smjera kretanja po osi pravokutni koordinatni sistem zasnovan na izmjerenoj prosječnoj brzini kretanja i slučajnim odstupanjima nelinearnog nosača radara od date putanje, mjerač vremena, uređaj za pohranu, blok ključa koji se sastoji od tri ključa, uređaj za oduzimanje, blok sumiranja koji se sastoji od tri uređaji za sumiranje, blok uređaja za skladištenje koji se sastoji od tri uređaja za skladištenje, jedinica za skaliranje koja se sastoji od tri uređaja za skaliranje, jedinica za množenje koda koja se sastoji od tri množitelja koda, sabirača i pretvarača koda, dok generator taktnih impulsa i uređaj za određivanje pravac kretanja duž osi pravougaonog koordinatnog sistema su serijski povezani, sabirač, pretvarač kodova, uređaj za skaliranje i uređaj za skladištenje su povezani u seriju, pored toga, prvi, drugi i treći izlaz uređaja za određivanje smjer kretanja duž osi pravokutnog koordinatnog sistema spojeni su na prve ulaze odgovarajućih tipki bloka ključeva, čiji su drugi ulazi povezani sa izlazom tajmera, prvi izlaz kretanja uređaja za određivanje smjera duž osi pravougaonog koordinatnog sistema povezan je i sa drugim ulazom uređaja za oduzimanje, izlazi prvog, drugog i trećeg ključa bloka ključeva povezani su sa prvim ulazima odgovarajućih uređaja za sumiranje bloka za sumiranje, čiji su izlazi povezani na ulaze odgovarajućih uređaja za skladištenje bloka uređaja za pohranu, čiji su izlazi povezani na druge ulaze odgovarajućih uređaja za sabiranje bloka za sumiranje i sa ulazima odgovarajućih uređaja za skaliranje bloka skalirajući blok, izlaz svakog uređaja za skaliranje bloka za skaliranje je povezan na prvi i drugi ulaz odgovarajućih množitelja koda bloka za množenje koda, izlazi prvog, drugog i trećeg množitelja koda bloka za množenje koda su povezani na odgovarajuće ulaze sabirača izlaz uređaja za skladištenje je povezan sa prvim ulazom uređaja za oduzimanje, a izlaz uređaja za oduzimanje, drugi i treći izlaz uređaja za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema, a izlaz kodnog pretvarača su, redom, prvi, drugi, treći i četvrti izlaz jedinice za kompenzaciju nestabilnosti trajektorije.
Suština izuma je izmjeriti prosječnu brzinu kretanja i slučajna odstupanja nelinearnog radarskog nosača od date putanje duž apscise, ordinate i aplikativne osi i implementirati u svaki od kanala za obradu eho signala nelinearnog radara poznatu algoritam za sintezu otvora antene uzimajući u obzir rezultate mjerenja, što omogućava postizanje ugaone rezolucije bliske potencijalnoj.
Blok dijagram predloženog nelinearnog radara sa antenom sintetizovanog otvora prikazan je na slici 1.
Predloženi nelinearni radar sa antenom sintetizovanog otvora sastoji se od predajnika 5, odašiljačke antene 1, prijemnih antena prvog i drugog kanala 2 i 4, prijemnika prvog i drugog kanala 7 i 8, uređaja za indikaciju 26, referentnog oscilator 3, sintetizator frekvencije 6, jedinica za kompenzaciju putanje nestabilnosti 19, uređaji za fazni pomak prvog i drugog kanala 9 i 10, detektori prve i druge faze prvog kanala 11 i 12, detektori prve i druge faze drugog kanala 13 i 14, prvi i drugi analogno-digitalni pretvarači prvog kanala 15 i 16, prvi i drugi analogno-digitalni pretvarači drugog kanala 17 i 18, kalkulatori prve i druge referentne funkcije prvog kanala 20 i 21, kalkulatori prve i druge referentne funkcije drugog kanala 22 i 23, sistemi digitalne obrade prvog i drugog kanala 24 i 25, povezani kako je prikazano na slici 1.
Predajnik 5 generiše sondažni signal na frekvenciji ω 0 sa zadatim parametrima (snaga, vrsta modulacije, itd.). Predajna antena 1 je dizajnirana da emituje sondirajući signal na frekvenciji ω 0 . Prijemne antene prvog i drugog kanala 2 i 4 koriste se za prijem eho signala iz OENS-a na frekvencijama 2ω 0 i 3ω 0, respektivno. Prijemnici prvog i drugog kanala 7 i 8 prenose signale primljene na frekvencijama 2ω 0 i 3ω 0 na međufrekvenciju ω pr i pojačavaju ih. Referentni oscilator 3 proizvodi signal stabilne frekvencije ω og. Sintetizator frekvencije 6 generiše noseće signale ω 0 i međufrekvencije ω pr na svom prvom i drugom izlazu, respektivno. Fazni pomerači prvog i drugog kanala 9 i 10 pomeraju fazu referentnog signala u svakom kanalu za π/2. Detektori prve faze prvog i drugog kanala 11 i 13 odabiru sinusne komponente signala u odgovarajućim kanalima, a detektori druge faze prvog i drugog kanala 12 i 14 - kosinusne. Prvi i drugi analogno-digitalni pretvarači svakog kanala 15, 16, 17 i 18 dizajnirani su za pretvaranje analognih signala u digitalne. Jedinica za kompenzaciju nestabilnosti trajektorije 19 prati nasumična odstupanja nosača radara od date trajektorije i generiše odgovarajući signal neusklađenosti za korekciju referentne funkcije. Prvi kalkulatori referentne funkcije prvog i drugog kanala 20 i 22 čine sinusne komponente potpornih funkcija, drugi kalkulator referentne funkcije prvog i drugog kanala 21 i 23 - kosinusne komponente potpornih funkcija odgovarajućih kanala, uzimajući u obzir signale neusklađenosti koji dolaze iz jedinice za kompenzaciju trajektorija nestabilnosti 19. Digitalni sistemi obrade prvog i drugog kanala 24 i 25 koriste se za generiranje OENS radarskih slika iz signala primljenih na frekvencijama 2ω 0 i 3ω 0 . Uređaj za prikaz 26 je neophodan za prikaz radarskih slika sa potrebnom svjetlinom, dinamičkim rasponom i razmjerom.
Navedeni nelinearni radar sa antenom sa sintetičkim otvorom radi na sljedeći način. Tokom vremenskog intervala sinteze otvora antene T s, osigurava se pravolinijsko kretanje nelinearnog radarskog nosača konstantnom brzinom (najvažniji slučaj za praksu). Da bi se osigurala koherentnost, signal referentnog oscilatora 3 na frekvenciji ω og se dovodi na druge ulaze prijemnika prvog i drugog kanala 7 i 8, koji su ulazi vanjskog referentnog oscilatora, kao i na ulaz sintisajzera frekvencije 6, koji generiše noseće signale ω 0 i međufrekvencije ω r. Na osnovu signala na frekvenciji ω 0 koji dolazi sa prvog izlaza sintisajzera frekvencije 6 na ulaz predajnika 5, formira se ES sa potrebnim parametrima na frekvenciji ω 0. Tako generisani signal se dovodi na ulaz odašiljačke antene 1 i emituje u datu oblast prostora. Signal na međufrekvenciji ω sa drugog izlaza sintisajzera frekvencije 6 se dovodi na druge ulaze detektora prve faze prvog i drugog kanala 11 i 13, kao i na ulaze uređaja za pomak faze prvi i drugi kanali 9 i 10. Osim toga, signal na međufrekvenciji ω pr također dolazi sa izlaza prijemnika svakog kanala na prvi ulaz prvog faznog detektora odgovarajućeg kanala. Izlazni signal uređaja za pomak faze svakog kanala 9 i 10 se dovodi na drugi ulaz drugog faznog detektora odgovarajućeg kanala 12 i 14. Budući da su referentni signali na međufrekvenciji ω pr na drugim ulazima prvog a detektori druge faze svakog kanala 11 i 12, 13 i 14 imaju fazni pomak π/2, na izlazima prvih faznih detektora svakog kanala 11 i 13, sinusne komponente signala koji dolaze iz prijemnika prvog i drugog formiraju se kanali 7 i 8, a na izlazima detektora druge faze 12 i 14 - kosinusne komponente. Generirane kvadraturne komponente se pretvaraju u digitalni oblik pomoću prvog i drugog analogno-digitalnog pretvarača svakog kanala 15, 17 i 16, 18 i dovode se na prvi i drugi ulaz digitalnog procesorskog sistema odgovarajućeg kanal 24 i 25. Signal neusklađenosti koji generiše jedinica za kompenzaciju nestabilnosti trajektorije 19, u svakom kanalu se dovodi na ulaze prvog i drugog kalkulatora referentne funkcije 20, 22 i 21, 23. Kalkulator prve i druge referentne funkcije svakog kanala 20, 22 i 21, 23 generiraju, redom, sinusnu i kosinusnu komponentu referentne funkcije, koje se dovode redom na treći i četvrti ulaz sistema digitalne obrade odgovarajućeg kanala 24 i 25. U sistemima digitalne obrade prvog i drugog kanala 24 i 25 implementiran je dobro poznati algoritam za sintetizaciju otvora antene i kao rezultat toga, radarske slike OENS-a formiraju se od signala primljenih na frekvencijama 2ω 0 i 3ω 0 , odnosno. Ovako formirane radarske slike se sa izlaza sistema za digitalnu obradu prvog i drugog kanala 24 i 25 dovode do odgovarajućih ulaza uređaja za prikaz 26, uz pomoć kojih se radarske slike vizualno prikazuju.
Jedinica za kompenzaciju nestabilnosti trajektorije može se napraviti, na primjer, u obliku uređaja, čiji je blok dijagram prikazan na slici 2.
Jedinica za kompenzaciju nestabilnosti trajektorije uključuje generator taktnih impulsa 1, uređaj za skaliranje 2, uređaj za određivanje smjera kretanja duž osi pravokutnog koordinatnog sistema 3, mjerač vremena 4, uređaj za pohranu podataka 5, blok ključeva 6, a uređaj za oduzimanje 7, blok za sumiranje 8, blok uređaja za skladištenje 9, blok skaliranja 10, jedinica za množenje koda 11, sabirač 12, pretvarač koda 13, spojeni kao što je prikazano na sl.2.
Generator taktnih impulsa 1 je dizajniran da generiše niz impulsa datog trajanja τ i sa periodom T i. Tajmer 4 služi za održavanje bloka ključeva 6 u otvorenom stanju za dati vremenski interval T t . Uređaj za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema 3 generiše na prvom, drugom i trećem izlazu signale koji odgovaraju kretanju nosača radara za vreme T i duž ose apscise Δx i, ordinate Δy i i primijeniti Δz i, odnosno, pri čemu Blok ključa 6 osigurava prolaz signala sa prvog, drugog i trećeg ulaza uređaja za određivanje smjera kretanja duž osi pravokutnog koordinatnog sistema 3 do izlaza odgovarajućeg ključa Ključni blok 6. Blok za sumiranje 8 se koristi za sumiranje signala dostupnih na prvom i drugom ulazu svakog uređaja za sumiranje bloka za sumiranje 8. Memorijski blok 9 je neophodan za pohranjivanje rezultata dobivenog zbira u bloku sumiranja 8. Blok za skaliranje 10 usredsređuje rezultate zbrajanja signala i generira signale na prvom, drugom i trećem izlazu koji odgovaraju srednjim vrijednostima kretanja nosača radara duž ordinate apscise i bloka množenja koda 11 je namijenjen za konstruiranje kvadrata vrijednosti, a sabirač 12 se koristi za implementaciju matematičke operacije ![]()
Pretvarač kodova 13 izvodi matematičku operaciju izračunavanja prosječne brzine kretanja nosača radara

Uređaj za skaliranje 2 je neophodan za izračunavanje referentne vrijednosti kretanja nosača radara duž x-ose ![]() Memorijski uređaj 5 pohranjuje dobivenu vrijednost Δx 0 . U uređaju za oduzimanje 7 izvodi se matematička operacija kojom se od referentne vrijednosti Δx 0 oduzima vrijednost trenutnog kretanja nosača radara duž ose apscise pravokutnog koordinatnog sistema Δx i.
Memorijski uređaj 5 pohranjuje dobivenu vrijednost Δx 0 . U uređaju za oduzimanje 7 izvodi se matematička operacija kojom se od referentne vrijednosti Δx 0 oduzima vrijednost trenutnog kretanja nosača radara duž ose apscise pravokutnog koordinatnog sistema Δx i.
Jedinica za kompenzaciju nestabilnosti trajektorije radi na sljedeći način. Prvo se mjeri prosječna brzina nosača navigacijskog radara.
Režim mjerenja brzine se aktivira ručno uključivanjem tajmera 4, na kraju kojeg se automatski isključuje, tj. trajanje moda mjerenja vrijednosti određeno je vremenom T t . U režimu merenja prosečne brzine, takt impulsi trajanja τ i sa periodom T i, generisani generatorom taktnih impulsa 1, dovode se na ulaz uređaja za određivanje smera kretanja duž osi pravougaone koordinate. sistem 3, koji, kada se radarski nosač pomera, generiše vrednost na svom prvom, drugom i trećem izlazu pomeranja duž apscisnih ose Δx i, ordinatne ose Δu i i primene Δz i, respektivno. Za vrijeme T t, signal sa izlaza tajmera 4 održava blok ključeva 6 u otvorenom stanju, zbog čega se signali s prvog, drugog i trećeg izlaza uređaja za određivanje smjera kretanja duž ose pravougaonog koordinatnog sistema 3, koje stignu na prve ulaze odgovarajućih tastera ključnog bloka 6, dovode se na prve ulaze odgovarajućih uređaja za sabiranje bloka za sumiranje 8. Blok za sumiranje 8 zajedno sa blokom uređaja za skladištenje 9, sumira digitalne kodove kretanja duž apscisa, ordinatnih i aplikativnih ose, koji se zatim primaju sa izlaza prvog, drugog i trećeg uređaja za skladištenje drugog bloka uređaja za skladištenje 9, odnosno na ulaze odgovarajućih uređaja za skaliranje skalirajućeg bloka 10, u kojima se primljeni signali množe sa digitalnim kodom vrijednosti i, kao rezultat, prosječne vrijednosti pomaka za vremenski interval T i duž apscisnih osa ordinate i applicate. Dobijeni signali se zatim šalju bloku množenja koda 11 i sabiraču 12 kako bi se dobio zbir kvadrata naznačenih signala. ![]() koji ulazi u kodni pretvarač 13, gdje se u skladu sa (1) pretvara u vrijednost srednje brzine. formira se vrijednost kretanja nosača radara duž apscise
koji ulazi u kodni pretvarač 13, gdje se u skladu sa (1) pretvara u vrijednost srednje brzine. formira se vrijednost kretanja nosača radara duž apscise ![]() Signal Δx 0 sa izlaza uređaja za skaliranje 2 se dovodi na ulaz memorijskog uređaja 5, gdje se pamti i pohranjuje do sljedećeg određivanja srednje brzine, kada se nelinearni radar sa a antena sa sintetizovanim otvorom radi, signal Δx 0 sa izlaza memorijskog uređaja 5 se dovodi na prvi ulaz uređaja za oduzimanje 7, čiji drugi ulaz prima signal sa prvog izlaza uređaja za određivanje pravca kretanje duž osi pravougaonog koordinatnog sistema 3. U uređaju za oduzimanje 7 se izvode matematičke operacije za generisanje signala proporcionalnih odstupanju parametara kretanja nosača radara duž apscisne ose pravougaonog koordinatnog sistema od navedenih parametara. referentne putanje δx i =Δx 0 -Δx i .
Signal Δx 0 sa izlaza uređaja za skaliranje 2 se dovodi na ulaz memorijskog uređaja 5, gdje se pamti i pohranjuje do sljedećeg određivanja srednje brzine, kada se nelinearni radar sa a antena sa sintetizovanim otvorom radi, signal Δx 0 sa izlaza memorijskog uređaja 5 se dovodi na prvi ulaz uređaja za oduzimanje 7, čiji drugi ulaz prima signal sa prvog izlaza uređaja za određivanje pravca kretanje duž osi pravougaonog koordinatnog sistema 3. U uređaju za oduzimanje 7 se izvode matematičke operacije za generisanje signala proporcionalnih odstupanju parametara kretanja nosača radara duž apscisne ose pravougaonog koordinatnog sistema od navedenih parametara. referentne putanje δx i =Δx 0 -Δx i .
Potencijalno poboljšanje K u ugaonoj rezoluciji navigacionog radara sintetizacijom otvora antene je teorijski proučavano prema jednad.
gdje su Δl p i Δl, respektivno, kutne rezolucije navigacijskog radara bez i uz korištenje algoritma sinteze otvora antene; λ GS - talasna dužina GS; R - udaljenost između navigacionog radara i OENS-a; d je veličina stvarne prijemne antene; - harmonijski broj AP; - brzina nosača navigacionog radara; θ n - ugao posmatranja OENS-a. Proračuni izvršeni za slučaj upotrebe metode sinteze otvora antene u nelinearnom lokatoru "Lux" sa dimenzijama realnih prijemnih antena d = 0,25 m za bočni režim gledanja prostora (θ n = π/2), kao kao i sa ![]() T s =2 s, R=3 m, λ GS =0,3 m, ukazuju na poboljšanje ugaone rezolucije na drugom i trećem harmoniku GS za 32 i 48 puta, respektivno.
T s =2 s, R=3 m, λ GS =0,3 m, ukazuju na poboljšanje ugaone rezolucije na drugom i trećem harmoniku GS za 32 i 48 puta, respektivno.
Učinkovitost rada jedinice za kompenzaciju nestabilnosti trajektorije može se ocijeniti pomoću procjene izobličenja radarske slike OENS u odsustvu kompenzacije nestabilnosti trajektorije za slučaj pravolinijskog ravnomjernog kretanja nosača duž x koordinate za fiksne koordinate y=y 0, z=z 0. U ove svrhe izračunat ćemo impulsne odzive nelinearnog radara sa antenom sa sintetičkim otvorom (RAS OENS) za slučajeve odsustva i prisutnosti slučajnih odstupanja nosača radara od date putanje.

gdje je U(t+τ) signal putanje; T s - vremenski interval SA antene; τ - vremenski pomak; h(t) - funkcija podrške.
Kao referenca h(t), odabrana je ponderirana funkcija koja je kompleksno konjugirana sa signalom reflektiranim od nelinearne mete
gdje je H(t) stvarna težinska funkcija;  - promjena trenutne udaljenosti između navigacijskog radara i OENS-a.
- promjena trenutne udaljenosti između navigacijskog radara i OENS-a.
Pod pretpostavkom da je u slučaju kompenzacije za nestabilnost trajektorije δx 1 =0, au slučaju njenog odsustva - ![]() i date, na primjer, vrijednosti H(t)=1,
i date, na primjer, vrijednosti H(t)=1, ![]() T s =2 s, R=3 m, λ ZS =0,3 m, n=2, x=1 m, x 0 =0 m, dobijamo, u skladu sa (3), impulsne odzive J 1 (r) i prikazan nakon normalizacije odgovarajućim grafičkim zavisnostima 1 i 2 na Sl.3. Kako pokazuju proračuni, širina glavnog režnja impulsnog odziva je 1,15 puta veća od J 1 (τ). To znači da jedinica za kompenzaciju nestabilnosti trajektorije, napravljena u obliku uređaja, čija je blok dijagram prikazana na slici 2, pod datim uslovima, omogućava poboljšanje rezolucije nelinearnog radara sa sintetizovanim otvorom antene. duž ugaone koordinate za 15%.
T s =2 s, R=3 m, λ ZS =0,3 m, n=2, x=1 m, x 0 =0 m, dobijamo, u skladu sa (3), impulsne odzive J 1 (r) i prikazan nakon normalizacije odgovarajućim grafičkim zavisnostima 1 i 2 na Sl.3. Kako pokazuju proračuni, širina glavnog režnja impulsnog odziva je 1,15 puta veća od J 1 (τ). To znači da jedinica za kompenzaciju nestabilnosti trajektorije, napravljena u obliku uređaja, čija je blok dijagram prikazana na slici 2, pod datim uslovima, omogućava poboljšanje rezolucije nelinearnog radara sa sintetizovanim otvorom antene. duž ugaone koordinate za 15%.
Dakle, u predloženom nelinearnom radaru sa antenom sa sintetičkim otvorom, kutna rezolucija je povećana zbog formiranja velikog otvora antene na datoj putanji nosača radara, te kompenzacijske jedinice za nestabilnosti trajektorije, napravljene u obliku uređaj, čiji je blok dijagram prikazan na slici 2, omogućava potencijalno dostižnu ugaonu rezoluciju (njeno potencijalno poboljšanje u skladu sa izrazom (2)) smanjenjem izobličenja radarske slike uzrokovane ekspanzijom glavnog režnja impulsnog odziva (3 ).
Predloženo tehničko rješenje je novo, budući da je iz javno dostupnih informacija nepoznat nelinearni radar sa antenom sa sintetičkim otvorom, koji se razlikuje od poznatog navigacijskog radara koji se sastoji od predajnika, odašiljačke antene i dva identična kanala za obradu signala na frekvencijama drugi 2ω 0 i treći 3ω 0 harmonik Zemlje, od kojih svaki sadrži prijemnu antenu i prijemnik spojene u seriju, kao i uređaje za prikaz, pri čemu su dodatno uvedeni referentni oscilator, sintetizator frekvencije i jedinica za kompenzaciju nestabilnosti trajektorije. , dizajniran da generiše odgovarajući signal korekcije neusklađenosti na osnovu izmerene prosečne brzine kretanja i slučajnih odstupanja nelinearnog nosača radara od jedne zadate trajektorije, au svakom od kanala - uređaj za pomeranje faze, prvi i drugi fazni detektori, prvi i drugi analogno-digitalni pretvarači, prvi kalkulator referentne funkcije dizajniran da formira sinusnu komponentu referentne funkcije, drugi kalkulator referentne funkcije dizajniran da formira kosinusnu komponentu funkcija referentne funkcije, sistem digitalne obrade, dok izlaz referentnog oscilatora spojen je na ulaz sintisajzera frekvencije i na druge ulaze prijemnika prvog i drugog kanala, prvi izlaz sintisajzera frekvencije povezan je sa ulazom predajnika čiji je izlaz spojen na ulaz odašiljačke antene, drugi izlaz sintisajzera frekvencije je povezan u svakom kanalu na drugi ulaz prvog faznog detektora i ulaz uređaja za pomak faze, izlaz uređaja za pomak faze svakog kanala je spojen na drugi ulaz detektora druge faze odgovarajućeg kanala, izlaz prijemnika svakog kanala povezan je sa prvim ulazima prvog i drugog faznog detektora odgovarajućeg kanala, čiji su izlazi povezani na ulaze prvog i drugog analogno-digitalnog pretvarača odgovarajućih kanala, čiji su izlazi u svakom od kanala povezani, odnosno na prvi i drugi ulaz sistema digitalne obrade odgovarajućeg kanala, ulazi prvi i drugi kalkulator referentne funkcije svakog kanala su povezani na izlaz jedinice za kompenzaciju nestabilnosti trajektorije, izlazi prvog i drugog kalkulatora referentne funkcije svakog kanala su povezani, respektivno, na treći i četvrti ulaz digitalni procesni sistem odgovarajućeg kanala, izlazi sistema digitalne obrade prvog i drugog kanala povezani su na prvi i drugi ulaz uređaja za prikaz, a jedinica za kompenzaciju nestabilnosti trajektorije sadrži generator taktnih impulsa, uređaj za skaliranje, uređaj za određivanje smjera kretanja duž osi pravokutnog koordinatnog sistema na osnovu izmjerene prosječne brzine kretanja i slučajnih odstupanja nelinearnog nosača radara od date putanje, mjerač vremena, uređaj za pohranu podataka, ključ blok koji se sastoji od tri ključa, uređaja za oduzimanje, bloka za sumiranje koji se sastoji od tri uređaja za sumiranje, jedinice za pohranu koja se sastoji od tri uređaja za pohranu, jedinice za skaliranje koja se sastoji od tri uređaja za skaliranje, jedinice za množenje koda koja se sastoji od tri množitelja koda, sabirača i kodni pretvarač, pri čemu su generator taktnih impulsa i uređaj za određivanje smjera kretanja duž osi pravougaonog koordinatnog sistema spojeni u seriju, a sabirač, pretvarač kodova, uređaj za skaliranje i uređaj za skladištenje su povezani u seriju, osim toga, prvi, drugi i treći izlazi uređaja za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema povezani su sa prvim ulazima odgovarajućih tastera bloka ključeva, čiji su drugi ulazi povezani sa izlazom tajmer, prvi izlaz uređaja za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema je takođe povezan sa drugim ulazom uređaja za oduzimanje, izlazi prvog, drugog i trećeg tastera bloka ključeva su spojeni na prve ulaze odgovarajućih uređaja za sumiranje bloka za sumiranje, čiji su izlazi povezani na ulaze odgovarajućih uređaja za pohranu podataka bloka uređaja za pohranu, čiji su izlazi povezani na druge ulaze odgovarajućih uređaja za sumiranje bloka za sumiranje i na ulaze odgovarajućih uređaja za skaliranje bloka za skaliranje, izlaz svakog uređaja za skaliranje bloka za skaliranje povezan je sa prvim i drugim ulazima odgovarajućih množitelja koda bloka za množenje koda, izlazima prvi, drugi i treći kodni množitelji bloka za množenje kodova povezani su na odgovarajuće ulaze sabirača, izlaz uređaja za skladištenje je povezan na prvi ulaz uređaja za oduzimanje, a izlaz uređaja za oduzimanje, drugi i treći izlazi uređaja za određivanje pravca kretanja duž osa pravougaonog koordinatnog sistema, izlaz kodnog pretvarača su, redom, prvi, drugi, treći i četvrti izlaz nestabilnosti blokade putanje kompenzacije.
Predloženo tehničko rješenje je inventivnog koraka, jer iz objavljenih naučnih podataka i poznatih tehničkih rješenja ne proizlazi jasno da nelinearni radar sa antenom sa sintetičkim otvorom omogućava postizanje ugaone rezolucije bliske potencijalnoj.
Predloženo tehničko rješenje je industrijski primjenjivo, jer se za njegovu implementaciju mogu koristiti standardne radiotehničke komponente i uređaji koji se koriste u SAR-u, kao i mikrovalna oprema i materijali rasprostranjene tehnologije.
Blok kompenzacije za nestabilnost trajektorije može se napraviti pomoću standardnih impulsnih i digitalnih uređaja.
Tako se uređaj za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema može napraviti, na primer, na osnovu optičkog manipulatora tipa „miš“, pod uslovom da je koordinata y=y 0 =h 0 je fiksna, gdje je h 0 visina ravne površine za pomicanje optičkog manipulatora tipa „miš“ iznad nivoa poda u prostoriji u kojoj se koristi nelinearni radar sa antenom sa sintetičkim otvorom. Generator takta može biti izgrađen kao oscilator za blokiranje tranzistora ili kao oscilator za blokiranje integriranog kola. Za implementaciju bloka ključeva mogu se odabrati tranzistorski prekidači. Tajmer se izvršava kao jedan ciklus. Osnova uređaja za skladištenje i jedinice za skladištenje mogu biti poluvodički uređaji sa slučajnim pristupom ili memorijski uređaji samo za čitanje. Sabirač i jedinica za sabiranje mogu se konstruirati korištenjem paralelnog kola za sabiranje. Jedinica za skaliranje, uređaj za skaliranje i konvertor koda mogu se napraviti prema poznatom krugu pretvarača koda. Uređaj za oduzimanje treba da bude izgrađen na bazi sabirača koji vrše oduzimanje. Jedinica za množenje koda je bazirana na poznatim uređajima za množenje koda.
Izvori informacija
1. Antipov V.N., Goryainov V.T., Kulin A.N. i druge radarske stanice sa digitalnom sintezom otvora antene. / Ed. V.T.Goryainova. - M.: Radio i komunikacija, 1988.
2. Kondratenkov G.S., Frolov A.Yu. Radiovision. Radarski sistemi za daljinsko istraživanje Zemlje. - M.: Radiotehnika, 2005.
3. Nelinearni lokator "Lux". Tehnički opis i uputstvo za upotrebu. - M.: Novokom, 2005.
4. Gorbačov A.A., Koldanov A.P., Larcov S.V., Tarakankov S.P., Čigin E.P. Znakovi prepoznavanja nelinearnih raspršivača elektromagnetskih valova // Nelinearni radar. Sažetak članaka. Dio 1. / Sub. Ed. Gorbačova A.A., Koldanova A.P., Potapova A.A., Čigina E.P. - M.: Radiotehnika, 2005. - P.15-23.
5. Semenov D.V., Tkachev D.V. Nelinearni radar: NR koncept // Posebna tehnologija. / Istraživački institut za specijalnu opremu Ministarstva unutrašnjih poslova Rusije, 1999, br. 1-2. - P.17-22.
6. Kondratenkov G.S., Potekhin V.A., Reutov A.P., Feoktistov Yu.A. Radarske stanice za istraživanje zemlje. / Ed. G.S. Kondratenkova. - M.: Radio i komunikacija, 1983.
7. Goldenberg L.M. Pulsni i digitalni uređaji: Udžbenik za komunikacione zavode. - M.: Komunikacija, 1973.
8. Lebedev O.N., Sidorov A.M. Impulsni i digitalni uređaji: Digitalni čvorovi i njihov dizajn na mikrokolama. - L.: VAS, 1980.
9. Priručnik o radaru. / Ed. M. Skolnik, New York, 1970: Trans. sa engleskog (u četiri toma). / Pod općim uredništvom. K.N. Trofimova; Sveska 2. Radarski antenski uređaji. - M.: Sov. radio, 1979.
10. Dulin V.N. Elektronski i kvantni mikrotalasni uređaji: udžbenik za studente visokotehničkih obrazovnih ustanova. 2. izdanje, revidirano. - M.: Energija, 1972.
11. Sa stanovišta optičkih miševa...//URL:http://www.iXBT.com.
12. Simonovich S.V. i drugi Velika knjiga personalnog računara. - M.: OLMA Media Group, 2007.
13. Brammer Yu.A. Pulsni i digitalni uređaji: Udžbenik. za studente elektro i radio instrumentarskih sredina. specijalista. udžbenik ustanove. / Yu.A. Brammer, I.N. - 6. izd., revidirano. i dodatne - M.: Viša škola, 2002.
Nelinearna radarska stanica (radar) sa antenom sa sintetičkim otvorom, koja se sastoji od predajnika, odašiljačke antene i dva identična kanala za obradu signala na frekvencijama drugog 2ω 0 i trećeg 3ω 0 harmonika zvučnog signala (SA), svaki od koji sadrži serijski spojenu prijemnu antenu i prijemnik, kao i uređaj za indikaciju, karakteriziran time što su dodatno uvedeni referentni oscilator, sintetizator frekvencije i jedinica za kompenzaciju nestabilnosti trajektorije, dizajnirani da generiraju odgovarajući signal korekcije neusklađenosti na osnovu izmjerenog prosječna brzina kretanja i slučajna odstupanja nelinearnog nosača radara od zadate putanje, te u svaki od kanala - uređaj za fazni pomak, prvi i drugi fazni detektori, prvi i drugi analogno-digitalni pretvarači, kalkulator prve referentne funkcije dizajniran da formira sinusnu komponentu referentne funkcije, drugi kalkulator referentne funkcije dizajniran da formira kosinusnu komponentu referentne funkcije, sistem digitalne obrade dizajniran za formiranje radarske slike objekta s nelinearnim električnim svojstvima, dok je izlaz referentni generator je povezan na ulaz sintisajzera frekvencije i na druge ulaze prijemnika prvog i drugog kanala, prvi izlaz sintisajzera frekvencije je povezan na ulaz predajnika čiji je izlaz povezan sa ulaz odašiljačke antene, drugi izlaz frekvencija sintisajzera je spojen u svakom kanalu na drugi ulaz prvog detektora faze i ulaz uređaja za pomak faze, izlaz uređaja za pomak faze svakog kanala je spojen na drugi ulaz detektora druge faze odgovarajućeg kanala, izlaz prijemnika svakog kanala je povezan sa prvim ulazima prvog i drugog faznog detektora odgovarajućeg kanala, izlazi koji su povezani sa ulazima prvog i drugi analogno-digitalni pretvarači odgovarajućih kanala, čiji su izlazi u svakom od kanala povezani, redom, na prvi i drugi ulaz sistema digitalne obrade odgovarajućeg kanala, ulazi prvog i drugog referentnog kalkulatori funkcija svakog kanala su povezani na izlaz jedinice za kompenzaciju nestabilnosti trajektorije, izlazi prvog i drugog kalkulatora referentne funkcije svakog kanala su povezani na treći i četvrti ulaz sistema za digitalnu obradu odgovarajućeg kanala , izlazi sistema digitalne obrade prvog i drugog kanala su povezani na prvi i drugi ulaz uređaja za prikaz, a jedinica za kompenzaciju nestabilnosti trajektorije sadrži generator taktnih impulsa, uređaj za skaliranje, uređaj za određivanje pravca kretanja duž osi pravougaonog koordinatnog sistema na osnovu mjerenja prosječne brzine kretanja i slučajnih odstupanja nelinearnog nosača radara od date putanje, tajmer, uređaj za skladištenje, blok ključa koji se sastoji od tri ključa, uređaj za oduzimanje, blok sumiranja koji se sastoji od tri uređaja za sabiranje, jedinica za skladištenje koja se sastoji od tri uređaja za skladištenje, jedinica za skaliranje koja se sastoji od tri uređaja za skaliranje, jedinica za množenje koda koja se sastoji od tri kodna množitelja, sabirača i pretvarača koda, sa generatorom taktnih impulsa i uređajem za određivanje smjer kretanja po osi pravokutnog koordinatnog sistema su povezani u seriju, sabirač, pretvarač kodova, uređaj za skaliranje i uređaj za skladištenje su povezani u seriju, pored toga, prvi, drugi i treći izlaz uređaja za određivanje smjera kretanja duž osa pravougaonog koordinatnog sistema spojeni su na prve ulaze odgovarajućih tipki bloka ključeva, čiji su drugi ulazi povezani sa izlazom tajmera, prvi izlaz uređaja za određivanje smjera kretanja po osi pravougaonog koordinatnog sistema je takođe povezan na drugi ulaz uređaja za oduzimanje, izlazi prvog, drugog i trećeg ključa bloka ključeva su povezani na prve ulaze odgovarajućih uređaja za sumiranje bloka za sumiranje, izlazi koji su povezani na ulaze odgovarajućih uređaja za pohranu blok uređaja za pohranu, čiji su izlazi povezani na druge ulaze odgovarajućih uređaja za sabiranje bloka za sumiranje i na ulaze odgovarajućih uređaja za skaliranje skalirajućeg bloka, izlaz svakog uređaja za skaliranje u bloku za skaliranje povezan je na prvi i drugi ulaz odgovarajućih množitelja koda bloka za množenje koda, izlazi prvog, drugog i trećeg množenja kodova bloka za množenje koda su povezani na odgovarajući ulaza sabirača, izlaz uređaja za skladištenje povezan je sa prvim ulazom uređaja za oduzimanje, a izlaz uređaja za oduzimanje, drugi i treći izlaz uređaja za određivanje pravca kretanja duž osi pravougaonika. U koordinatnom sistemu, izlaz kodnog pretvarača su prvi, drugi, treći i četvrti izlaz bloka za kompenzaciju nestabilnosti trajektorije.
Jedna od važnih oblasti upotrebe radara je njihova upotreba u avionu koji vrši pregled zemljine površine. Ovisno o zadacima koje treba riješiti, potrebnoj veličini prostora za gledanje i vremenu pregleda, razlikuju se sljedeće vrste pregleda:
· pogled na traku (anterolateralni pogled);
· pregled sektora;
· teleskopski pogled.
Moguće su i druge vrste recenzija, koje su ili posebni slučajevi gore navedenih recenzija ili njihove kombinacije.
Mjera ugaone pozicije objekta koji emituje i parametar koji omogućava mjerenje ugaonih koordinata i pruža ugaonu rezoluciju je Doplerova frekvencija. Povoljni uslovi za rešavanje ovih problema stvaraju se pod uslovom bočnog pogleda na zemljinu površinu aviona, održavanja kursa, frekvencije i brzine.
Detaljnost radarske slike zemljine površine ovisi o rezoluciji u smjeru poprečno na radar, kao i o rezoluciji duž staze.
Rezolucija u poprečnom pravcu (tangencijalna rezolucija) zavisi od opsega zvučnih signala i ugla elevacije objekata u poprečnoj ravni.
Rezolucija duž puta je različita između nekoherentne i koherentne obrade. U prvom slučaju određuje se širinom dijagrama zračenja koji odgovara otvoru antene postavljene na avion. Koherentnom obradom može se značajno povećati prema sintetizovanom otvoru, određenom količinom kretanja aviona tokom obrade.
Prilikom izrade radara sa sintetizovanom opremom, na avionu se postavlja slabo usmerena antena koja obezbeđuje bočni pogled na prostor (slika 6.1). Signali primljeni iz različitih tačaka putanje se pohranjuju i obrađuju, kao u antenskom nizu, gdje se dodaju u fazi, formirajući maksimalnu amplitudu ukupnog signala.

Sintetizovana antena se formira pomeranjem jednog elementa čija je osa dijagrama zračenja orijentisana okomito na pravolinijski put leta (slika 6.2).
Kada se koriste impulsni signali, oni se primaju i pohranjuju u tačkama putanje koje su međusobno razmaknute na udaljenosti gdje je brzina leta; - period ponavljanja pulsa. Zatim se signali sumiraju u kolo prikazano na slici 2. Udaljenost na kojoj se vrši sumiranje je otvor sintetizirane antene (slika 6.3).

Sumiranje signala se vrši u liniji kašnjenja LZ. Postoje nefokusirane (slika 6.4.) i fokusirane sintetizovane antene. Karakteristika nefokusirane antene je zbir primljenih signala van faze. Ekvivalentna dužina je ograničena mogućnošću zbrajanja signala približno u fazi, odnosno kada razlika u udaljenosti od radara do cilja ne prelazi λ/8 (slika 6.5).
Zbog malenosti drugog člana dobijamo
Širina dijagrama zračenja takve antene
![]() (6.3)
(6.3)
U ovom slučaju, tangencijalna rezolucija
![]() (6.4)
(6.4)
poboljšana u odnosu na panoramsku antenu
gdje je rezolucija azimuta.
Sada je proporcionalno ne R, već .

Kod fokusiranih antena, fazni pomaci se uvode u lanac elemenata niza u antenama kako bi se kompenziralo kretanje radara u odnosu na cilj (slika 6.6).

Veličina prave antene u horizontalnoj ravni je L, širina njenog uzorka
Dužina sintetizovane antene jednaka je dužini putanje leta duž koje radar zrači krug (slika 6.7).
Širina dijagrama zračenja antene je
![]() .
.
Tangencijalna rezolucija
![]() . (6.7)
. (6.7)
Ne zavisi od dometa i jednak je polovini veličine prave antene.
Nemoguće je napraviti radar sa sintetizovanom antenom na tradicionalan način jer je za to potrebno značajno: dužina fokusirane antene (stotine m); kašnjenje signala u liniji kašnjenja (desetine s); broj zbrojenih impulsa (desetine hiljada).
U praksi se Doplerov efekat i usklađeno filtriranje koriste za izradu radara sa sintetizovanom antenom. Doplerova informacija o frekvenciji se koristi kao mjera ugaone pozicije. Neka emiteri A kontinuiranih monohromatskih oscilacija frekvencije f 0 budu locirani duž prave linije x, paralelno sa putanjom letelice, koja leži u bočnoj traci (slika 6.8).

U svakom trenutku, emitovane oscilacije se mogu razlikovati po Doplerovoj frekvenciji
![]() . (6.8)
. (6.8)
Ako procijenimo promjene u vremenu na udaljenosti od prijemnika do tačke A, možemo odrediti zakon modulacije signala
gdje je trenutak vremena kada se prijemnik nalazi na najkraćoj udaljenosti r 0 od tačke A. Kvadratna promjena vremena kašnjenja odgovara linearnoj promjeni trenutne frekvencije
![]() (6.10)
(6.10)
Dakle, primljeni signal je frekvencijsko moduliran. Kada se obradi u optimalnom filteru usklađenom s očekivanim frekvencijskim moduliranim signalom, opaža se kompresija signala. Trajanje komprimovanog signala je
![]() (6.11)
(6.11)
gdje je trajanje impulsnog odziva filtera. Sličan komprimovani impuls će biti primljen za signal koji dolazi iz bilo koje druge tačke A; vremenski interval između ovih impulsa će biti = gdje je brzina cilja. Minimalni dozvoljeni vremenski interval je određen trajanjem komprimovanog impulsa
Omjer / = može se smatrati mjerom sintetizirane ugaone rezolucije
![]() (6.13)
(6.13)
gde je = veličina ekvivalentnog sintetizovanog otvora formiranog pomeranjem prijemne tačke tokom trajanja koherentne akumulacije. Kompresija vam omogućava da dobijete rezoluciju sličnu onoj kod fokusirane antene.
Da bi se osigurala rezolucija dometa, potrebno je koristiti pulsno zračenje, a impulsi moraju biti međusobno koherentni.
Dakle, radar sa sintetičkim otvorom mora sadržavati
1. koherentno-pulsni radar sa pravom koherencijom;
2. sistem za obradu signala koji mora izvršiti optimalnu obradu azimuta (podudarno filtriranje) u svakom elementu rezolucije raspona.
Jedna od opcija za takav lokator prikazana je na slici 6.9.
Mogu se koristiti i druge sheme, ali signali moraju biti koherentni (na primjer, sečenje iz iste harmonijske oscilacije).
Izlazni element koherentno-pulsnog radarskog prijemnika je fazni detektor, čiji se izlazni napon određuje na sljedeći način
gdje su amplitude napona koherentnog lokalnog oscilatora i izlaznog signala;
Početne faze oscilacija;
Doplerov pomak frekvencije.

Signal sa tačkastog cilja na izlazu faznog detektora je impulsni niz sa omotačem koji ponavlja kvadrat dijagrama usmerenosti stvarne antene i amplitudnom modulacijom doplerovom frekvencijom (slika 6.10). tokom perioda ponavljanja T p, tada se za svaki od njih provodi koordinirano filtriranje.

Postoje sljedeće metode za izradu odgovarajuće opreme:
1. Snimanje signala sa faznog detektora na fotografski film sa naknadnom optičkom obradom.
2. Digitalna obrada signala.
Digitalna obrada se zasniva na optimalnoj detekciji rafala radio impulsa sa nasumičnom početnom fazom. Optimalna obrada se svodi na izračunavanje modula korelacionog integrala. Ali pošto signal nije kontinuiran, već diskretan, ne izračunava se integral, već zbir
gdje je proizvodnja ulaznog signala;
– funkcija podrške;
n – broj uzorka signala slike;
k – referentni broj referentne funkcije;
N – broj diskretnih vrijednosti potporne funkcije.
U slučaju digitalne obrade, blok dijagram prijemnika ima oblik prikazan na sl. 6.11.

Za pronalaženje realnog i imaginarnog dijela reprezentacije ulaznog signala, uređaj za obradu je izgrađen sa kvadraturnim kanalima (slika 6.12). Na sl. Slika 6.13 prikazuje strukturu digitalne obrade u jednom elementu rezolucije.

Krug izvodi operacije predviđene prema formuli za S out (n): stvarni i imaginarni dijelovi proizvoda nalaze se pod znakom zbira za svaku od N vrijednosti funkcije podrške i zbrajaju.