Synthèse d'ouverture. Radar non linéaire avec une antenne à synthèse d'ouverture. Que s'est-il passé avant
La synthèse de l'ouverture de l'antenne est l'un des domaines les plus prometteurs du développement des radars. Elle est apparue à la fin des années 50 et a immédiatement attiré l'attention. Le principal avantage de cette direction est une augmentation multiple (1 000 fois ou plus) de la résolution angulaire du radar. Cela garantit la possibilité de vision radio des objets radar et de détection de petits objets, augmentant ainsi la précision de la désignation des cibles et l'immunité au bruit du radar. Lors de la première étape du développement de ce domaine, les principaux succès ont été obtenus en augmentant considérablement l'efficacité de la reconnaissance aérienne et spatiale. Par la suite, les méthodes de synthèse d'ouverture ont commencé à être utilisées dans les complexes de reconnaissance et de frappe, les radars d'avions multifonctionnels pour détecter des cibles petites et groupées et pointer vers elles des armes guidées, dans les radars de surveillance planifiés, les systèmes électroniques de reconnaissance et de navigation.
Il y a eu deux étapes dans le développement de la théorie et de la pratique, du radar à la radiovision.
Dans un premier temps, grâce à l'utilisation de signaux de sondage à large bande (100 MHz ou plus), il a été possible d'obtenir une haute résolution en termes de retard du signal et, par conséquent, une haute résolution en portée (quelques mètres ou mieux). La résolution de portée est donnée par
Largeur spectrale du signal de sondage.
![]() - longueur d'onde radar ; c 1 - taille de l'antenne,
- longueur d'onde radar ; c 1 - taille de l'antenne,
![]()

Formation du motif d'une antenne réelle. Pour expliquer le principe de la synthèse d'ouverture, considérons d'abord la formation du diagramme de rayonnement d'une antenne réelle, qui détermine la résolution le long de la coordonnée angulaire d'un radar conventionnel.
Soit une ouverture d'antenne linéaire de taille d sur laquelle une onde électromagnétique plane tombe sous un angle de 0 (Fig. 2.1), c'est-à-dire L'antenne reçoit.
Par ouverture (ouverture), nous entendons la partie de l'antenne qui participe à l'émission ou à la réception d'une onde électromagnétique. Le front d'onde est une surface de phases égales. Dans le cas considéré, il s’agit d’un avion. La phase de l'onde électromagnétique le long de l'ouverture (axe X) est déterminée par le retard du front d'onde par rapport au centre de l'ouverture :

où r(x) est la distance entre le front d'onde et le point x sur l'ouverture.
Le diagramme de rayonnement est formé à la suite de la sommation en phase d’une onde électromagnétique incidente sur l’ouverture :

Intensité des ondes électromagnétiques.
Le diagramme de rayonnement normalisé dans ce cas est égal à

au niveau de 0,7 ou, ce qui revient au même, 0,5 en puissance :
![]()
Lorsqu'une antenne fonctionne non seulement pour la réception, mais aussi pour l'émission, le diagramme est déterminé comme suit :

et la largeur de faisceau équivalente pour l'émission et la réception
![]()
![]()
![]()
Dans un cas plus général, l'ouverture de l'antenne détermine le volume du signal spatio-temporel analysé, qui représente la dépendance de l'intensité, de la phase et de la polarisation du champ électromagnétique sur les coordonnées spatiales et le temps. Ainsi, l'ouverture est caractérisée par les dimensions géométriques du volume analysé de l'onde électromagnétique, le temps d'analyse, les paramètres de polarisation et de fréquence. Dans ce cas, la résolution le long de la coordonnée angulaire est déterminée par la variation du signal spatio-temporel dans l'ouverture de l'antenne en fonction de la position angulaire de la source d'ondes électromagnétiques.
Des exemples bien connus d’un tel signal spatio-temporel sont les lentilles holographiques volumétriques et les ouvertures synthétisées.

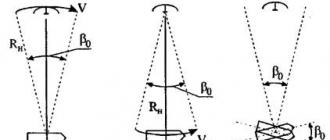
Synthèse d'ouverture. La principale différence entre les ouvertures synthétisées (artificielles) et les ouvertures d'antenne conventionnelles (réelles) réside dans le fait que l'ouverture synthétique (SA) est formée séquentiellement dans le temps. A un instant donné, la réception d'une onde électromagnétique s'effectue par une ouverture réelle, et l'ouverture synthétisée est le résultat d'une réception séquentielle dans le temps d'une onde électromagnétique par une ouverture réelle à sa position différente par rapport à la source de l'onde électromagnétique. onde électromagnétique. Considérons le processus de synthèse en utilisant l'exemple de la formation d'une ouverture SAR rectiligne (Fig. 2.2).
Son diagramme de rayonnement de réception est déterminé de la même manière que le diagramme de l'ouverture réelle. Incursion de phase d'onde entre deux positions d'une antenne réelle sur une trajectoire

deux fois plus grande qu'une ouverture classique, ce qui est dû au double passage de l'onde électromagnétique à une distance r (à l'émission et à la réception). En conséquence, la largeur du diagramme de rayonnement d'une ouverture SAR synthétisée de ce type est plus petite que celle d'une ouverture réelle de même taille :

Le principal résultat de la synthèse d’ouverture est que la taille de l’ouverture a augmenté N fois par rapport à la taille de l’ouverture réelle.
ouverture synthétisée formée en conséquence
déplacer la vraie antenne. Dans ce cas, l'effet est obtenu en augmentant le volume du champ analysé dans l'espace et dans le temps.
Propriétés de base d'une ouverture synthétisée. Considérons les principales propriétés de l'ouverture synthétisée.
pour les systèmes embarqués dans les avions et les systèmes spatiaux. Les valeurs typiques pour les tailles relatives des ouvertures de divers systèmes sont les suivantes :
En raison de la grande taille de l'ouverture SAR, il est possible d'obtenir une haute résolution linéaire en coordonnées angulaires à longue portée :

L'ouverture synthétisée est formée à la suite de la réception et du traitement des signaux réfléchis par la cible, c'est-à-dire l'ouverture synthétisée détermine le motif uniquement pour la réception. Le modèle de transmission lors de la synthèse d'ouverture est déterminé par le modèle de l'antenne réelle. Les propriétés de polarisation et de fréquence du SA sont également déterminées par l'antenne réelle.
Lors de la synthèse d'une ouverture, un seul élément d'antenne (véritable antenne) peut fonctionner (émettre, recevoir) à la fois. Dans ce cas, aucun problème électrodynamique ne se pose lors de la formation de l'ensemble de l'ouverture, puisqu'il n'y a pas d'interaction d'éléments dans le champ électromagnétique. La tâche de synthèse de l'ouverture et de formation du diagramme de rayonnement se résume en réalité au développement d'algorithmes et à leur mise en œuvre par le processeur de traitement du signal de trajectoire. Comme pour une antenne réelle, le motif d'une ouverture synthétisée est la dépendance du signal à la sortie du processeur sur la coordonnée angulaire d'une source ponctuelle de rayonnement ou de réémission (dans le cas d'un SAR actif).
Le motif peut être monofaisceau, multifaisceau, monopulse, adaptatif, etc.
Les objets d'observation SAR sont dans la plupart des cas situés dans la zone intermédiaire (zone de Fresnel) de l'ouverture, et non dans la zone lointaine, comme pour la plupart des antennes réelles. Pour la réception en champ lointain, le front d’onde au niveau de l’ouverture est supposé plat. À mesure que la taille de l’ouverture augmente (ou que la distance à l’objet diminue), la sphéricité du front d’onde ne peut plus être négligée. Généralement, la condition de champ lointain s'écrit sous la forme
![]()
Pour une véritable antenne radar embarquée, la limite du champ lointain est d'environ 100 m, mais une fois synthétisée, elle s'élève à des milliers de kilomètres. Ainsi, en SAR, lors du traitement d'un signal de trajectoire, il est nécessaire de prendre en compte la sphéricité du front de phase de l'onde électromagnétique. Dans le SAR le plus simple, lorsque la taille du SA est petite, la courbure du front d’onde électromagnétique n’est pas prise en compte. Ce mode est appelé rétrécissement du faisceau Doppler (DBT) et l'augmentation de la résolution est faible (10...30) fois.
La prise en compte de la sphéricité du front d'onde lors du traitement du signal de trajectoire est appelée mise au point, et l'ouverture, par conséquent, est appelée ouverture focalisée. En figue. La figure 2.3 montre la répartition du champ des ouvertures non focalisées (DOL) (a) et focalisées (b) dans les zones intermédiaire et lointaine du motif.

À la distance de mise au point, c'est-à-dire la même chose qu'une antenne à champ lointain conventionnelle. On peut dire que le processus de focalisation transfère les propriétés directionnelles de l'ouverture de la zone lointaine vers la zone intermédiaire.
Étant donné que la sphéricité du front d'onde dépend de la distance à l'objet, une loi de focalisation différente est requise pour différentes distances, c'est-à-dire Pour garantir la focalisation du SA, un algorithme multicanal par plage pour traiter le signal de trajectoire est nécessaire.
Grâce à la focalisation, le SA offre non seulement une résolution angulaire mais également une résolution en distance dans la zone intermédiaire, même avec un signal modulé. Cependant, elle est généralement petite et la résolution de distance est assurée par la modulation du signal de sondage.
Les principales sources d'erreurs - incohérence du signal de trajectoire - sont les instabilités de phase des modules émetteurs-récepteurs, les instabilités de trajectoire du porteur SAR et les instabilités du milieu de propagation des ondes électromagnétiques. Ainsi, l'erreur tolérée dans la connaissance de la trajectoire de l'antenne est égale à plusieurs millimètres (dans la plage centimétrique de l'onde électromagnétique). Cela nécessite des mesures spéciales pour compenser ces erreurs à l’aide de systèmes de micro-navigation et d’algorithmes de mise au point automatique.
Les caractéristiques énergétiques du SA (rapport signal/bruit interne) sont déterminées par le gain de l'antenne réelle et le temps de synthèse, c'est-à-dire temps d’accumulation cohérente des signaux. L'immunité au bruit contre les interférences externes actives et passives est déterminée à la fois par le diagramme de l'antenne réelle et par les propriétés directionnelles de la SA, c'est-à-dire sélection spatiale des interférences.
En effet, à chaque position de l'antenne lors de la synthèse d'ouverture, la puissance du signal reçu est déterminée par la puissance de rayonnement et le gain de l'antenne, et l'addition en phase de ces signaux lors de la synthèse équivaut à l'accumulation d'énergie du signal lors de la synthèse à une puissance spectrale constante du bruit interne. De plus, une sélection angulaire est possible par rapport aux sources d'interférences externes, dont l'efficacité dépend des motifs des ouvertures réelles et synthétisées.
Le mouvement relatif de l'antenne et de l'objet requis pour former la SA peut être réalisé par divers procédés. La formation d'une SA à la suite du mouvement d'une antenne avec un objet fixe est appelée synthèse directe, et la formation d'une SA à la suite du mouvement d'un objet et d'une antenne fixe est appelée synthèse inverse. Dans ce cas, il est possible de former une SA suite à la rotation de l'objet, ce qui équivaut au mouvement de l'antenne autour de l'objet.
L'utilisation non seulement d'une, mais de plusieurs antennes simultanément dans le processus de synthèse permet de synthétiser non seulement des SA linéaires, mais également plates et volumétriques.
![]() ce qui représente une tâche extrêmement difficile pour les calculateurs numériques embarqués. Dans des conditions au sol, ce problème est résolu avec succès par un processeur optique, qui utilise l'enregistrement du signal de trajectoire sur un film photographique et le traitement du signal analogique à l'aide d'un système optique cohérent.
ce qui représente une tâche extrêmement difficile pour les calculateurs numériques embarqués. Dans des conditions au sol, ce problème est résolu avec succès par un processeur optique, qui utilise l'enregistrement du signal de trajectoire sur un film photographique et le traitement du signal analogique à l'aide d'un système optique cohérent.
La synthèse d'ouverture nécessite un certain temps, ce qui entraîne un retard d'information dans le SAR. Le délai minimum d'information est déterminé par le temps de synthèse, c'est-à-dire moment de la constitution de la SA. Il s'agit généralement de dixièmes - unités de secondes. Le délai maximum est déterminé en tenant compte du temps d'exécution de l'algorithme de synthèse par le processeur correspondant de traitement des signaux de trajectoire. Les processeurs optiques au sol ont la latence la plus élevée. Il comprend le temps de vol de l'avion dans la zone d'opération SAR, le temps de retour à la base, le temps de livraison du film photographique avec enregistrement des signaux de trajectoire au laboratoire, le temps de traitement photochimique du film, de traitement optique et enregistrement de l'image sur un film photographique secondaire et, enfin, traitement photochimique du film secondaire. Ce temps peut atteindre plusieurs heures.
La synthèse d'ouverture (SA) est une méthode de traitement du signal qui peut augmenter considérablement la résolution linéaire transversale du radar par rapport à la direction du fond et améliorer le détail de l'image radar de la zone. Le SA est utilisé pour obtenir une carte radar (lors de la cartographie), la reconnaissance de l'état des glaces et dans d'autres situations. En termes de qualité et de détail, ces cartes sont comparables aux photographies aériennes, mais contrairement à ces dernières, elles peuvent être obtenues en l'absence de visibilité optique de la surface terrestre (en vol au-dessus des nuages et de nuit).
14.1. Principe de fonctionnement et conception du radar avec SA
Le détail d'une image radar dépend de la résolution linéaire du radar. Lors de l'utilisation de coordonnées polaires, la résolution en portée (résolution radiale) est déterminée par les paramètres du signal de sondage, et dans la direction transversale (résolution tangentielle) par la largeur du fond du radar et la distance à la cible (Fig. 14.1). Le détail de l'image radar de la zone est d'autant plus élevé qu'elle est petite, c'est-à-dire cela dépend de la taille (surface) de l'élément de résolution.

Riz. 14.1. Paramètres caractérisant le détail d'une image radar
Puisque le problème de réduction est résolu en utilisant des signaux de sondage avec des durées d'impulsion courtes ou en passant à des signaux complexes (modulés en fréquence ou à déphasage). La réduction nécessite l'utilisation de faisceaux étroits, car elle est proportionnelle à la largeur du faisceau et (k est la longueur d'onde ; longueur de l'antenne), qui ne peut pas être supérieure à la taille longitudinale (longueur) de l'avion. Le principal moyen d'augmenter la résolution tangentielle est d'utiliser la méthode de synthèse dans les radars
ouverture de l'antenne lorsque l'avion est en mouvement. Le plus souvent, les radars avec SA sont utilisés dans les radars dits à balayage latéral (Fig. 14.2).
Dans les radars dont l'antenne est située le long du fuselage, plus la taille longitudinale du fuselage de l'avion est grande, plus elle est haute. Étant donné que la taille de l'antenne interne est structurellement limitée, le détail de l'image des radars dotés d'antennes le long du fuselage s'améliore, même si la dépendance à la portée demeure.
Une voie plus radicale conduit aux radars à synthèse d'ouverture (SAR) lors du mouvement vers l'avant de l'avion.

Riz. 14.2. Modèles de radar à balayage latéral
Le principe de la synthèse d'ouverture. Supposons qu'un réseau phasé linéaire de taille (ouverture) (Fig. 14.3,a) soit constitué d'émetteurs. En additionnant les signaux reçus par les sources, il est possible à chaque instant d'obtenir un diagramme multiéléments avec une largeur. Si pour assurer une largeur donnée, il est possible de synthétiser un réseau multiéléments en déplaçant séquentiellement un émetteur (antenne). ) le long de cette ouverture à une certaine vitesse V, recevant les signaux réfléchis par la cible, les stockant, puis les traitant ensemble (Fig. 14.3, b). Dans ce cas, une ouverture d'antenne linéaire avec une taille effective et
Cependant, la largeur du faisceau augmente le temps de synthèse et l'équipement radar devient plus complexe.
Laissez l'avion se déplacer à une certaine hauteur avec une vitesse constante V de manière rectiligne et parallèle à la surface de la Terre (Fig. 14.4).

Riz. (4.3. Antenne réseau à commande de phase (a) et circuit de synthèse d'ouverture lors du déplacement de l'émetteur (b)
Une antenne avec une largeur inférieure et tournée de 90° par rapport à la ligne de trace passe séquentiellement par une série de positions dans lesquelles elle reçoit des signaux réfléchis par une cible située en un point de la surface de la Terre. À différentes positions d'antenne (différentes), les signaux provenant du même point parcourent des distances différentes, ce qui entraîne un changement dans les déphasages de ces signaux provoqué par la différence de trajet puisque le signal se déplace deux fois (dans la direction de la cible et en s'en éloignant). it), deux signaux reçus à des positions d'antenne adjacentes diffèrent en phase de
Selon que les déphasages (formés sur les segments) sont compensés ou non lors du traitement des signaux reçus, une distinction est faite entre les SAR focalisés et non focalisés. Dans le premier cas, le traitement se réduit au déplacement des antennes, au stockage des signaux, à la compensation des déphasages et à la sommation. signaux (voir Fig. a dans la seconde - aux mêmes opérations, mais sans compensation des déphasages.

Riz. 14.4. L'apparition de déphasages lors du mouvement rectiligne d'un avion lors de la synthèse d'ouverture
Résolution tangentielle du SAR. Le traitement non focalisé fournit l'addition de signaux V, avec une différence dans les phases des signaux provenant des éléments extérieurs et centraux de l'ouverture. Si nous supposons que la valeur maximale sera de la Fig. 14.4 suit donc, si alors
Ainsi, lors de la sommation des signaux sur une section de trajectoire égale à la largeur du motif de faisceau synthétisé sera
Dans ce cas, la résolution tangentielle est à une distance arbitraire de la cible (Fig. 14.5).

Riz. 14.5. Dépendance de la résolution tangentielle par rapport à la portée dans un radar conventionnel (1), dans un radar non focalisé avec SA (2) et dans un radar focalisé avec SA (3)
Avec un traitement focalisé, les signaux sont sommés dans la section de mixage de l'antenne réelle installée sur l'avion, dans laquelle est irradiée la cible située au point :
Dans ce cas, la largeur de l'ADN synthétisé
et résolution tangentielle
![]()
Schéma structurel du SAR. La base du SAR est constituée de radars à impulsions cohérentes, construits selon un schéma à cohérence interne (Fig. 14.6).
Un oscillateur cohérent (CG) à une fréquence sert à générer un signal de sondage avec une fréquence dans un modulateur à bande latérale unique. La source d'oscillations avec une fréquence est un générateur de radiofréquence (RFG). Le signal de sondage est modulé par une séquence d'impulsions du modulateur. L'amplificateur de puissance (PA) est l'étage final de l'émetteur. Le traitement du signal (mémorisation, compensation de phase, sommation) est généralement effectué par des filtres numériques complexes à basses fréquences, de sorte que le circuit fournit des canaux en quadrature, dont chacun commence par un détecteur de phase correspondant. La source de tension de référence pour les détecteurs de phase est un oscillateur local cohérent (LOO). Les signaux du canal en quadrature (qui stockent les informations de phase) sont transmis soit à un appareil d'enregistrement, soit à un appareil de traitement numérique en temps réel (RDP). Lors du traitement du signal analogique dans un radar avec SA, les informations provenant des sorties des détecteurs de phase en quadrature sont introduites dans un dispositif spécial d'enregistrement, par exemple, dans un dispositif optique pour enregistrer des images sur un film photographique à partir de l'écran d'un tube cathodique, modulé en luminosité

Riz. 14.6. Schéma fonctionnel d'un radar à ouverture synthétique
taches lumineuses. Le traitement et la reproduction des informations ont lieu plus tard, après le traitement du film, avec un certain retard (et non en temps réel).
Dans le traitement du signal numérique, les informations résultantes sont obtenues immédiatement lors du traitement en temps réel.
Principes de traitement du signal en SAR. Pour tout type de traitement, il est nécessaire de mémoriser une trame d’informations sur les signaux cibles.
Les dimensions du cadre sont définies en azimut par la valeur effective de l'ouverture synthétisée et en distance (Fig. 14.7a).
Puisque les signaux reçus à chaque position d'antenne arrivent à l'entrée du récepteur à partir de la distance de visualisation séquentiellement dans le temps, ils sont également enregistrés séquentiellement dans chacun des canaux azimutaux, ce qui est classiquement représenté par des flèches sur la figure. 14.7, b. Dans ce cas, un cadre d'image correspondant à la zone de terrain est formé avec les dimensions Obtenir des informations sur la position angulaire de la cible, c'est-à-dire la coordonnée x lors de la synthèse d'une ouverture n'est possible qu'en analysant les signaux réfléchis par cette cible, enregistrés pendant l'intervalle de synthèse. Par conséquent, les informations du dispositif d'enregistrement sont lues séquentiellement dans chacun des canaux de portée (Fig. 14.7c).

Riz. 14.7. Trame de terrain mémorisée (a) : schémas d'enregistrement (b) et de lecture (c) des sitaps
Signal traité en SAR. Laissez le radar fonctionner en mode impulsionnel. Puis, pendant la période de répétition, l'antenne se décale d'un segment
Pour éviter de rater la cible avec un tel décalage d'antenne, nous exigeons que sur la Fig. 14.8. Dans ce cas, un cadre d'image correspondant à la zone de terrain est formé avec des dimensions et obtient des informations sur la position angulaire de la cible, c'est-à-dire la coordonnée x lors de la synthèse d'une ouverture n'est possible qu'en analysant les signaux réfléchis par cette cible, enregistrés pendant l'intervalle de synthèse. Par conséquent, les informations du dispositif d'enregistrement sont lues séquentiellement dans chacun des canaux de portée (voir Fig. 14.7, a). . Supposons maintenant qu'il soit immobile et que la cible

Riz. 14.8. Cinématique de mélange mutuel et cible ponctuelle
se déplace par rapport à lui avec la même vitesse V (Fig. 14.9,a). En commençant le compte à rebours à partir du moment où la cible (point M) passe le milieu de l'ouverture et en comptant, nous avons
Lorsqu'une cible traverse le diagramme de rayonnement, le décalage de fréquence Doppler (Fig. et la phase (Fig. 14.9, c) change selon les lois :

Notez que les coefficients de constante en vol "k et V dépendent ; par conséquent, le traitement du signal est multicanal.
L'amplitude complexe des signaux réfléchis lors de la synthèse d'ouverture peut être représentée comme

Riz. 14.9. Schéma de formation du vecteur vitesse radial (a) ; la nature du changement de la fréquence Doppler (b) et de la phase (c) du signal lors du survol de la cible
Dans un radar à impulsions, le signal arrive à des instants discrets, donc alors


Les composantes discrètes du signal (14.4) doivent être mémorisées sur l'intervalle de temps , où
Algorithmes de traitement du signal en SAR. Pour un traitement optimal du signal (14.4), un filtre à réponse impulsionnelle est nécessaire

Capitaine M. Vinogradov,
Candidat des Sciences Techniques
Les équipements radar modernes installés sur les avions et les engins spatiaux représentent actuellement l’un des segments de la technologie radioélectronique qui se développent le plus rapidement. L'identité des principes physiques qui sous-tendent la construction de ces moyens permet de les considérer dans un seul article. Les principales différences entre les radars spatiaux et aéronautiques résident dans les principes de traitement des signaux radar associés aux différentes tailles d'ouverture, les caractéristiques de propagation des signaux radar dans les différentes couches de l'atmosphère, la nécessité de prendre en compte la courbure de la surface terrestre, etc. Malgré ces différences, les développeurs de radars à synthèse d'ouverture (RSA) s'efforcent d'obtenir une similitude maximale dans les capacités de ces moyens de reconnaissance.
Actuellement, les radars embarqués à ouverture synthétique permettent de résoudre les problèmes de reconnaissance visuelle (prise de vue de la surface de la Terre selon différents modes), de sélection de cibles mobiles et fixes, d'analyse des changements de la situation au sol, de prise de vue d'objets cachés dans les forêts et de détection d'objets enfouis et de petite taille. objets marins de grande taille.
L'objectif principal du SAR est une étude détaillée de la surface de la Terre.

|
|
| Riz. 1. Modes d'enquête des SAR modernes (a - détaillé, b - aperçu, c - numérisation) | Riz. 2. Exemples d'images radar réelles avec des résolutions de 0,3 m (en haut) et 0,1 m (en bas) |
|
|
| Riz. 3. Vue des images à différents niveaux de détail | |

|

|
| Riz. 4. Exemples de fragments de zones réelles de la surface terrestre obtenus aux niveaux de détail DTED2 (à gauche) et DTED4 (à droite) | |
En augmentant artificiellement l'ouverture de l'antenne embarquée, dont le principe principal est l'accumulation cohérente des signaux radar réfléchis sur l'intervalle de synthèse, il est possible d'obtenir une résolution angulaire élevée. Dans les systèmes modernes, la résolution peut atteindre des dizaines de centimètres lorsqu’ils fonctionnent dans la plage de longueurs d’onde centimétriques. Des valeurs de résolution de plage similaires sont obtenues grâce à l'utilisation de la modulation intra-impulsionnelle, par exemple la modulation de fréquence linéaire (chirp). L'intervalle de synthèse d'ouverture de l'antenne est directement proportionnel à l'altitude de vol du porteur SAR, ce qui garantit que la résolution de tir est indépendante de l'altitude.
Actuellement, il existe trois modes principaux d'étude de la surface de la Terre : vue d'ensemble, numérisation et détaillée (Fig. 1). En mode levé, le levé de la surface terrestre est effectué en continu dans la bande d'acquisition, tandis que les modes latéral et avant-latéral sont séparés (en fonction de l'orientation du lobe principal du diagramme de rayonnement de l'antenne). Le signal est accumulé sur une période de temps égale à l'intervalle calculé pour synthétiser l'ouverture de l'antenne pour les conditions de vol données du porteur radar. Le mode de prise de vue par balayage diffère du mode d'enquête dans la mesure où la prise de vue s'effectue sur toute la largeur de la bande de visualisation, en bandes égales à la largeur de la bande de capture. Ce mode est utilisé exclusivement dans les radars spatiaux. Lors de la prise de vue en mode détaillé, le signal est accumulé sur un intervalle accru par rapport au mode aperçu. L'intervalle est augmenté en déplaçant le lobe principal du diagramme de rayonnement de l'antenne de manière synchrone avec le mouvement du support radar de sorte que la zone irradiée soit constamment dans la zone de tir. Les systèmes modernes permettent d'obtenir des images de la surface terrestre et des objets qui s'y trouvent avec des résolutions de l'ordre de 1 m pour la vue d'ensemble et de 0,3 m pour les modes détaillés. La société Sandia a annoncé la création d'un SAR pour drones tactiques, capable d'effectuer des relevés avec une résolution de 0,1 m en mode détaillé. Les méthodes de traitement numérique du signal reçu qui en résultent, dont un élément important sont les algorithmes adaptatifs de correction des distorsions de trajectoire, ont un impact significatif sur les caractéristiques résultantes du SAR (en termes d'étude de la surface de la Terre). C'est l'incapacité de maintenir longtemps une trajectoire rectiligne du porteur qui ne permet pas d'obtenir des résolutions comparables au mode détaillé en mode vue d'ensemble continue, bien qu'il n'y ait aucune restriction physique sur la résolution en mode vue d'ensemble.
Le mode de synthèse d'ouverture inverse (ISA) permet de synthétiser l'ouverture de l'antenne non pas en raison du mouvement du porteur, mais en raison du mouvement de la cible irradiée. Dans ce cas, il ne s’agit peut-être pas de mouvement vers l’avant, caractéristique des objets au sol, mais de mouvement pendulaire (dans différents plans), caractéristique des équipements flottants se balançant sur les vagues. Cette capacité détermine l’objectif principal de l’IRSA : la détection et l’identification d’objets marins. Les caractéristiques de l'IRSA moderne permettent de détecter en toute confiance même des objets de petite taille, tels que les périscopes sous-marins. Tous les avions en service dans les forces armées des États-Unis et d'autres pays, dont les missions incluent la patrouille de la zone côtière et des plans d'eau, sont capables de filmer dans ce mode. Les caractéristiques des images obtenues à la suite de la prise de vue sont similaires à celles obtenues à la suite d'une prise de vue avec synthèse d'ouverture directe (non inverse).
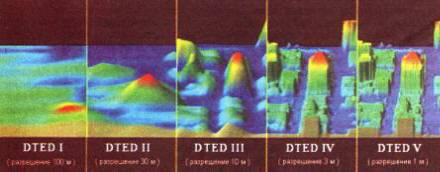
Le mode de relevé interférométrique (Interferometric SAR - IFSAR) permet d'obtenir des images tridimensionnelles de la surface terrestre. Dans le même temps, les systèmes modernes ont la capacité d'effectuer une prise de vue en un seul point (c'est-à-dire d'utiliser une seule antenne) pour obtenir des images en trois dimensions. Pour caractériser les données d'image, en plus de la résolution habituelle, un paramètre supplémentaire est introduit, appelé précision de la hauteur, ou résolution en hauteur. En fonction de la valeur de ce paramètre, plusieurs gradations standards d'images tridimensionnelles (DTED - Digital Terrain Elevation Data) sont déterminées :
DTEDO........................900 m
DTED1........................90m
DTED2........................ 30m
DTED3........................10m
DTED4........................Zm
DTED5........................1m
Le type d'images d'une zone urbanisée (modèle), correspondant à différents niveaux de détail, est présenté sur la Fig. 3.
Les niveaux 3 à 5 ont reçu le nom officiel de « données haute résolution » (données HRTe-High Resolution Terrain Elevation). L'emplacement des objets au sol dans les images des niveaux 0-2 est déterminé dans le système de coordonnées WGS 84, la hauteur est mesurée par rapport au repère zéro. Le système de coordonnées pour les images haute résolution n'est actuellement pas standardisé et est en discussion. En figue. La figure 4 montre des fragments de zones réelles de la surface terrestre obtenus grâce à une photographie stéréoscopique avec différentes résolutions.
En 2000, la navette spatiale américaine, dans le cadre du projet SRTM (Shuttle Radar Topography Mission), dont le but était d'obtenir des informations cartographiques à grande échelle, a réalisé des relevés interférométriques de la partie équatoriale de la Terre dans la bande de 60 °N. w. à 56° sud sh., aboutissant à un modèle tridimensionnel de la surface terrestre au format DTED2. Le projet NGA HRTe est-il développé aux États-Unis pour obtenir des données 3D détaillées ? dans lequel des images des niveaux 3 à 5 seront disponibles.
En plus du relevé radar des zones ouvertes de la surface terrestre, le radar aéroporté a la capacité d'obtenir des images de scènes cachées aux yeux de l'observateur. Il permet notamment de détecter les objets cachés dans les forêts, ainsi que ceux situés sous terre.
Le radar pénétrant (GPR, Ground Penetrating Radar) est un système de télédétection dont le principe de fonctionnement repose sur le traitement de signaux réfléchis par des zones de composition déformées ou différentes situées dans un volume homogène (ou relativement homogène). Le système de sondage de la surface terrestre permet de détecter des vides, des fissures et des objets enfouis situés à différentes profondeurs, et d'identifier des zones de différentes densités. Dans ce cas, l’énergie du signal réfléchi dépend fortement des propriétés d’absorption du sol, de la taille et de la forme de la cible ainsi que du degré d’hétérogénéité des régions limites. Actuellement, le GPR, en plus des applications militaires, est devenu une technologie commercialement viable.
Le sondage de la surface terrestre s'effectue par irradiation avec des impulsions d'une fréquence de 10 MHz à 1,5 GHz. L'antenne irradiante peut être située à la surface de la Terre ou située à bord d'un avion. Une partie de l’énergie du rayonnement est réfléchie par les changements dans la structure souterraine de la Terre, tandis que la majeure partie pénètre plus loin dans les profondeurs. Le signal réfléchi est reçu, traité et les résultats du traitement sont affichés sur l'écran. Au fur et à mesure que l’antenne se déplace, une image continue est générée qui reflète l’état des couches souterraines du sol. Étant donné que la réflexion se produit en réalité en raison des différences de constantes diélectriques de différentes substances (ou de différents états d'une substance), le sondage peut détecter un grand nombre de défauts naturels et artificiels dans une masse homogène de couches souterraines. La profondeur de pénétration dépend de l’état du sol sur le site d’irradiation. La diminution de l'amplitude du signal (absorption ou diffusion) dépend en grande partie d'un certain nombre de propriétés du sol, dont la principale est sa conductivité électrique. Ainsi, les sols sableux sont optimaux pour le sondage. Les sols argileux et très humides s’y prêtent beaucoup moins. Le sondage de matériaux secs tels que le granit, le calcaire et le béton donne de bons résultats.
La résolution de la détection peut être améliorée en augmentant la fréquence des ondes émises. Cependant, une augmentation de la fréquence a un effet négatif sur la profondeur de pénétration du rayonnement. Ainsi, les signaux avec une fréquence de 500 à 900 MHz peuvent pénétrer jusqu'à une profondeur de 1 à 3 m et fournir une résolution allant jusqu'à 10 cm, et avec une fréquence de 80 à 300 MHz, ils pénètrent jusqu'à une profondeur de 9 à 25 m. , mais la résolution est d'environ 1,5 m.
Le principal objectif militaire du radar de détection souterraine est de détecter les mines. Parallèlement, un radar installé à bord d'un avion, comme un hélicoptère, permet d'ouvrir directement des cartes de champs de mines. En figue. La figure 5 montre des images obtenues à l'aide d'un radar installé à bord d'un hélicoptère, reflétant la localisation de mines antipersonnel.
Un radar aéroporté conçu pour détecter et suivre les objets cachés dans les forêts (FO-PEN - FOliage PENetrating) permet de détecter de petits objets (en mouvement et fixes) cachés par les cimes des arbres. La prise de vue d'objets cachés dans les forêts s'effectue de la même manière que la prise de vue classique dans deux modes : aperçu et détaillé. En moyenne, en mode enquête, la bande passante d'acquisition est de 2 km, ce qui permet d'obtenir des images de sortie de zones de la surface terrestre de 2x7 km ; en mode détaillé, le relevé est réalisé par tronçons de 3x3 km. La résolution de prise de vue dépend de la fréquence et varie de 10 m à une fréquence de 20-50 MHz à 1 m à une fréquence de 200-500 MHz.
Les méthodes modernes d'analyse d'images permettent de détecter puis d'identifier des objets dans l'image radar résultante avec une probabilité assez élevée. Dans ce cas, la détection est possible dans des images à la fois haute (moins de 1 m) et basse (jusqu'à 10 m) résolution, tandis que la reconnaissance nécessite des images avec une résolution suffisamment élevée (environ 0,5 m). Et même dans ce cas, on ne peut parler pour l'essentiel que de reconnaissance par des signes indirects, puisque la forme géométrique de l'objet est très déformée du fait de la présence d'un signal réfléchi par le feuillage, ainsi que de l'apparition de signaux avec un décalage de fréquence dû à l'effet Doppler qui se produit à la suite du balancement des feuilles au vent.
En figue. La figure 6 montre des images (optiques et radar) de la même zone. Des objets (une colonne de voitures), invisibles sur une image optique, sont bien visibles sur une image radar, cependant, il est impossible d'identifier ces objets, en faisant abstraction des signes extérieurs (déplacement sur la route, distance entre les voitures, etc.), car à cette résolution, les informations sur la structure géométrique de l'objet sont complètement absentes.
Le détail des images radar résultantes a permis de mettre en pratique un certain nombre d'autres fonctionnalités, ce qui a permis de résoudre un certain nombre de problèmes pratiques importants. L'une de ces tâches consiste à suivre les changements survenus sur une certaine zone de la surface terrestre sur une certaine période de temps - une détection cohérente. La durée de cette période est généralement déterminée par la fréquence des patrouilles dans une zone donnée. Le suivi des changements est effectué sur la base de l'analyse d'images combinées en coordonnées d'une zone donnée, obtenues séquentiellement les unes après les autres. Dans ce cas, deux niveaux de détail d’analyse sont possibles.

|

|
| Fig 5. Cartes de champs de mines en représentation tridimensionnelle lors de tirs dans différentes polarisations : modèle (à droite), exemple d'image d'une zone réelle de la surface terrestre avec un environnement souterrain complexe (à gauche), obtenue à l'aide d'un radar installé à bord d'un hélicoptère | |

|
|
| Riz. 6. Images optiques (en haut) et radar (en bas) d'une zone avec un convoi de voitures circulant le long d'une route forestière | |

|
|
Le premier niveau implique la détection de changements significatifs et repose sur l'analyse des lectures d'amplitude de l'image, qui contiennent des informations visuelles de base. Le plus souvent, ce groupe comprend les changements qu'une personne peut voir en visualisant simultanément deux images radar générées. Le deuxième niveau est basé sur l'analyse des lectures de phase et permet de détecter des changements invisibles à l'œil humain. Il s'agit notamment de l'apparition de traces (d'une voiture ou d'une personne) sur la route, de changements d'état des vitres, des portes (« ouvertes - fermées »), etc.
Une autre capacité SAR intéressante, également annoncée par Sandia, est la vidéo radar. Dans ce mode, la formation discrète de l'ouverture de l'antenne de section en section, caractéristique du mode de levé continu, est remplacée par une formation multicanal parallèle. C'est-à-dire qu'à chaque instant, non pas une, mais plusieurs (le nombre dépend des tâches à résoudre) ouvertures sont synthétisées. Une sorte d’analogue au nombre d’ouvertures formées est la fréquence d’images lors de la prise de vue vidéo normale. Cette fonctionnalité vous permet de mettre en œuvre la sélection de cibles mobiles sur la base de l'analyse des images radar reçues, en appliquant les principes de détection cohérente, qui est intrinsèquement une alternative aux radars standards qui sélectionnent des cibles mobiles sur la base de l'analyse des fréquences Doppler dans le signal reçu. . L'efficacité de la mise en œuvre de tels sélecteurs de cibles mobiles est hautement discutable en raison des coûts matériels et logiciels importants. De tels modes ne resteront donc probablement qu'un moyen élégant de résoudre le problème de sélection, malgré les opportunités émergentes de sélectionner des cibles se déplaçant à très faible vitesse. (moins de 3 km/h, ce qui n'est pas disponible pour le Doppler SDC). L'enregistrement vidéo direct dans la portée radar n'est pas non plus utilisé actuellement, encore une fois en raison d'exigences de performances élevées, il n'existe donc aucun modèle opérationnel d'équipement militaire mettant en œuvre ce mode dans la pratique.
Une suite logique de l'amélioration de la technologie d'arpentage de la surface de la Terre dans le domaine radar est le développement de sous-systèmes d'analyse des informations reçues. En particulier, le développement de systèmes d'analyse automatique d'images radar permettant de détecter, d'isoler et de reconnaître des objets au sol dans la zone d'étude devient important. La difficulté de créer de tels systèmes est liée au caractère cohérent des images radar, dont les phénomènes d'interférence et de diffraction conduisent à l'apparition d'artefacts - éblouissement artificiel, semblables à ceux qui apparaissent lors de l'irradiation d'une cible avec une grande surface de diffusion effective. De plus, la qualité de l'image radar est quelque peu inférieure à la qualité d'une image optique similaire (en termes de résolution). Tout cela conduit au fait qu'il n'existe pas actuellement de mises en œuvre efficaces d'algorithmes de reconnaissance d'objets dans les images radar, mais la quantité de travaux menés dans ce domaine, certains succès obtenus récemment, suggèrent que dans un avenir proche, il sera possible de parler sur les véhicules de reconnaissance intelligents sans pilote, capables d'évaluer la situation au sol sur la base des résultats de l'analyse des informations reçues par leur propre équipement de reconnaissance radar embarqué.
Une autre direction de développement est l'intégration, c'est-à-dire l'intégration coordonnée avec un traitement conjoint ultérieur d'informations provenant de plusieurs sources. Il peut s'agir de radars effectuant des relevés selon différents modes, ou de radars et autres moyens de reconnaissance (optique, IR, multispectral, etc.).
Ainsi, les radars modernes à ouverture d'antenne synthétique permettent de résoudre un large éventail de problèmes liés à la réalisation de relevés radar de la surface de la Terre, quelles que soient l'heure de la journée et les conditions météorologiques, ce qui en fait un moyen important d'obtenir des informations sur l'état. de la surface de la Terre et des objets qui s'y trouvent.
Revue militaire étrangère n°2 2009 P.52-56
REVUE MILITAIRE ÉTRANGÈRE N° 2/2009, pp. 52-57
Capitaine M. VINOGRADOV,
Candidat des Sciences Techniques
Les équipements radar modernes installés sur les avions et les engins spatiaux représentent actuellement l’un des segments de la technologie radioélectronique qui se développent le plus rapidement. L'identité des principes physiques qui sous-tendent la construction de ces moyens permet de les considérer dans un seul article. Les principales différences entre les radars spatiaux et aéronautiques résident dans les principes de traitement des signaux radar associés aux différentes tailles d'ouverture, les caractéristiques de propagation des signaux radar dans les différentes couches de l'atmosphère, la nécessité de prendre en compte la courbure de la surface terrestre, etc. Malgré ces différences, les développeurs de radars à synthèse d'ouverture (RSA) s'efforcent d'obtenir une similitude maximale dans les capacités de ces moyens de reconnaissance.»
Actuellement, les radars embarqués à ouverture synthétique permettent de résoudre les problèmes de reconnaissance visuelle (prise de vue de la surface de la Terre selon différents modes), de sélection de cibles mobiles et fixes, d'analyse des changements de la situation au sol, de prise de vue d'objets cachés dans les forêts et de détection d'objets enfouis et de petite taille. objets marins de grande taille.
L'objectif principal du SAR est une étude détaillée de la surface de la Terre.
En augmentant artificiellement l'ouverture de l'antenne embarquée, dont le principe principal est l'accumulation cohérente des signaux radar réfléchis sur l'intervalle de synthèse, il est possible d'obtenir une résolution angulaire élevée. Dans les systèmes modernes, la résolution peut atteindre des dizaines de centimètres lorsqu’ils fonctionnent dans la plage de longueurs d’onde centimétriques. Des valeurs de résolution de plage similaires sont obtenues grâce à l'utilisation de la modulation intra-impulsionnelle, par exemple la modulation de fréquence linéaire (chirp). L'intervalle de synthèse d'ouverture de l'antenne est directement proportionnel à l'altitude de vol du porteur SAR, ce qui garantit que la résolution de tir est indépendante de l'altitude.
Riz. 3. Vue des images à différents niveaux de détail
Actuellement, il existe trois modes principaux d'étude de la surface de la Terre : vue d'ensemble, numérisation et détaillée (Fig. 1). En mode levé, le levé de la surface terrestre est effectué en continu dans la bande d'acquisition, tandis que les modes latéral et avant-latéral sont séparés (en fonction de l'orientation du lobe principal du diagramme de rayonnement de l'antenne). Le signal est accumulé sur une période de temps égale à l'intervalle calculé pour synthétiser l'ouverture de l'antenne pour les conditions de vol données du porteur radar. Le mode de prise de vue par balayage diffère du mode d'enquête dans la mesure où la prise de vue s'effectue sur toute la largeur de la bande de visualisation, en bandes égales à la largeur de la bande de capture. Ce mode est utilisé exclusivement dans les radars spatiaux. Lors de la prise de vue en mode détaillé, le signal est accumulé sur un intervalle accru par rapport au mode aperçu. L'intervalle est augmenté en déplaçant le lobe principal du diagramme de rayonnement de l'antenne de manière synchrone avec le mouvement du support radar de sorte que la zone irradiée se trouve constamment dans la zone de tir. Les systèmes modernes permettent d'obtenir des images de la surface terrestre et des objets qui s'y trouvent avec des résolutions de l'ordre de 1 m pour la vue d'ensemble et de 0,3 m pour les modes détaillés. La société Sandia a annoncé la création d'un SAR pour drones tactiques, capable d'effectuer des relevés avec une résolution de 0,1 m en mode détaillé. Les méthodes de traitement numérique du signal reçu qui en résultent, dont un élément important sont les algorithmes adaptatifs de correction des distorsions de trajectoire, ont un impact significatif sur les caractéristiques résultantes du SAR (en termes d'étude de la surface de la Terre). C'est l'incapacité de maintenir longtemps une trajectoire rectiligne du porteur qui ne permet pas d'obtenir des résolutions comparables au mode détaillé en mode vue d'ensemble continue, bien qu'il n'y ait aucune restriction physique sur la résolution en mode vue d'ensemble.
Le mode de synthèse d'ouverture inverse (ISA) permet de synthétiser l'ouverture de l'antenne non pas en raison du mouvement du porteur, mais en raison du mouvement de la cible irradiée. Dans ce cas, il ne s’agit peut-être pas de mouvement vers l’avant, caractéristique des objets au sol, mais de mouvement pendulaire (dans différents plans), caractéristique des équipements flottants se balançant sur les vagues. Cette capacité détermine l’objectif principal de l’IRSA : la détection et l’identification d’objets marins. Les caractéristiques de l'IRSA moderne permettent de détecter en toute confiance même des objets de petite taille, tels que les périscopes sous-marins. Tous les avions en service dans les forces armées des États-Unis et d'autres pays, dont les missions incluent la patrouille de la zone côtière et des plans d'eau, sont capables de filmer dans ce mode. Les caractéristiques des images obtenues à la suite de la prise de vue sont similaires à celles obtenues à la suite d'une prise de vue avec synthèse d'ouverture directe (non inverse).
Le mode de relevé interférométrique (Interferometric SAR - IFSAR) permet d'obtenir des images tridimensionnelles de la surface terrestre. Dans le même temps, les systèmes modernes ont la capacité d'effectuer une prise de vue en un seul point (c'est-à-dire d'utiliser une seule antenne) pour obtenir des images en trois dimensions. Pour caractériser les données d'image, en plus de la résolution habituelle, un paramètre supplémentaire est introduit, appelé précision de la hauteur, ou résolution en hauteur. En fonction de la valeur de ce paramètre, plusieurs gradations standards d'images tridimensionnelles (DTED - Digital Terrain Elevation Data) sont déterminées :
DTEDO........................900m
DTED1........................90m
DTED2........................ 30m
DTED3........................10m
DTED4........................Zm
DTED5........................ 1 m
Le type d'images d'une zone urbanisée (modèle), correspondant à différents niveaux de détail, est présenté sur la Fig. 3.
Les niveaux 3 à 5 sont officiellement appelés « données haute résolution »(HRTe - Haut Résolution Terrain Élévation données). L'emplacement des objets au sol dans les images des niveaux 0-2 est déterminé dans le système de coordonnées WGS 84, la hauteur est mesurée par rapport au repère zéro. Le système de coordonnées pour les images haute résolution n'est actuellement pas standardisé et est en discussion. En figue. La figure 4 montre des fragments de zones réelles de la surface terrestre obtenus grâce à une photographie stéréoscopique avec différentes résolutions.
En 2000, la navette spatiale américaine, dans le cadre du projet SRTM (Shuttle Radar Topography Mission), dont le but était d'obtenir des informations cartographiques à grande échelle, a réalisé des relevés interférométriques de la partie équatoriale de la Terre dans la bande de 60 °N. w. à 56° sud sh., aboutissant à un modèle tridimensionnel de la surface terrestre au format DTED2. Le projet NGA HRTe est-il développé aux États-Unis pour obtenir des données 3D détaillées ? dans lequel des images des niveaux 3 à 5 seront disponibles.
En plus du relevé radar des zones ouvertes de la surface terrestre, le radar aéroporté a la capacité d'obtenir des images de scènes cachées aux yeux de l'observateur. Il permet notamment de détecter les objets cachés dans les forêts, ainsi que ceux situés sous terre.
Radar pénétrant (GPR, Ground Penetrating Radar) est un système de télédétection dont le principe de fonctionnement repose sur le traitement de signaux réfléchis par des zones déformées ou de composition différente situées dans un volume homogène (ou relativement homogène). Le système de sondage de la surface terrestre permet de détecter des vides, des fissures et des objets enfouis situés à différentes profondeurs, et d'identifier des zones de différentes densités. Dans ce cas, l’énergie du signal réfléchi dépend fortement des propriétés d’absorption du sol, de la taille et de la forme de la cible ainsi que du degré d’hétérogénéité des régions limites. Actuellement, le GPR, en plus des applications militaires, est devenu une technologie commercialement viable.
Le sondage de la surface terrestre s'effectue par irradiation avec des impulsions d'une fréquence de 10 MHz à 1,5 GHz. L'antenne irradiante peut être située à la surface de la Terre ou située à bord d'un avion. Une partie de l’énergie du rayonnement est réfléchie par les changements dans la structure souterraine de la Terre, tandis que la majeure partie pénètre plus loin dans les profondeurs. Le signal réfléchi est reçu, traité et les résultats du traitement sont affichés sur l'écran. Au fur et à mesure que l’antenne se déplace, une image continue est générée qui reflète l’état des couches souterraines du sol. Étant donné que la réflexion se produit en réalité en raison des différences de constantes diélectriques de différentes substances (ou de différents états d'une substance), le sondage peut détecter un grand nombre de défauts naturels et artificiels dans une masse homogène de couches souterraines. La profondeur de pénétration dépend de l’état du sol sur le site d’irradiation. La diminution de l'amplitude du signal (absorption ou diffusion) dépend en grande partie d'un certain nombre de propriétés du sol, dont la principale est sa conductivité électrique. Ainsi, les sols sableux sont optimaux pour le sondage. Les sols argileux et très humides s’y prêtent beaucoup moins. Le sondage de matériaux secs tels que le granit, le calcaire et le béton donne de bons résultats.
La résolution de détection peut être améliorée en augmentant la fréquence des ondes émises. Cependant, une augmentation de la fréquence a un effet négatif sur la profondeur de pénétration du rayonnement. Ainsi, les signaux avec une fréquence de 500 à 900 MHz peuvent pénétrer jusqu'à une profondeur de 1 à 3 m et fournir une résolution allant jusqu'à 10 cm, et avec une fréquence de 80 à 300 MHz, ils pénètrent jusqu'à une profondeur de 9 à 25 m. , mais la résolution est d'environ 1,5 m.
Le principal objectif militaire du radar de détection souterraine est de détecter les mines. Parallèlement, un radar installé à bord d'un avion, comme un hélicoptère, permet d'ouvrir directement des cartes de champs de mines. En figue. La figure 5 montre des images obtenues à l'aide d'un radar installé à bord d'un hélicoptère, reflétant la localisation de mines antipersonnel.
Radar aéroporté conçu pour détecter et suivre les objets cachés dans les forêts (F.O.- STYLO - Feuillage Pénétrant), permet de détecter de petits objets (en mouvement et fixes) cachés par les cimes des arbres. La prise de vue d'objets cachés dans les forêts s'effectue de la même manière que la prise de vue classique dans deux modes : aperçu et détaillé. En moyenne, en mode enquête, la bande passante d'acquisition est de 2 km, ce qui permet d'obtenir des images de sortie de zones de la surface terrestre de 2x7 km ; en mode détaillé, le relevé est réalisé par tronçons de 3x3 km. La résolution de prise de vue dépend de la fréquence et varie de 10 m à une fréquence de 20-50 MHz à 1 m à une fréquence de 200-500 MHz.
Les méthodes modernes d'analyse d'images permettent de détecter puis d'identifier des objets dans l'image radar résultante avec une probabilité assez élevée. Dans ce cas, la détection est possible dans des images à la fois haute (moins de 1 m) et basse (jusqu'à 10 m) résolution, tandis que la reconnaissance nécessite des images avec une résolution suffisamment élevée (environ 0,5 m). Et même dans ce cas, on ne peut parler pour l'essentiel que de reconnaissance par des signes indirects, puisque la forme géométrique de l'objet est très déformée du fait de la présence d'un signal réfléchi par le feuillage, ainsi que de l'apparition de signaux avec un décalage de fréquence dû à l'effet Doppler qui se produit à la suite du balancement des feuilles au vent.
En figue. La figure 6 montre des images (optiques et radar) de la même zone. Des objets (une colonne de voitures), invisibles sur une image optique, sont bien visibles sur une image radar, cependant, il est impossible d'identifier ces objets, en faisant abstraction des signes extérieurs (déplacement sur la route, distance entre les voitures, etc.), car à cette résolution, les informations sur la structure géométrique de l'objet sont complètement absentes.
Le détail des images radar résultantes a permis de mettre en pratique un certain nombre d'autres fonctionnalités, ce qui a permis de résoudre un certain nombre de problèmes pratiques importants. L'une de ces tâches consiste à suivre les changements survenus sur une certaine zone de la surface terrestre sur une certaine période de temps - une détection cohérente. La durée de cette période est généralement déterminée par la fréquence des patrouilles dans une zone donnée. Le suivi des changements est effectué sur la base de l'analyse d'images combinées en coordonnées d'une zone donnée, obtenues séquentiellement les unes après les autres. Dans ce cas, deux niveaux de détail d’analyse sont possibles.
Le premier niveau implique la détection de changements significatifs et repose sur l'analyse des lectures d'amplitude de l'image, qui contiennent des informations visuelles de base. Le plus souvent, ce groupe comprend les changements qu'une personne peut voir en visualisant simultanément deux images radar générées. Le deuxième niveau est basé sur l'analyse des lectures de phase et permet de détecter des changements invisibles à l'œil humain. Il s'agit notamment de l'apparition de traces (d'une voiture ou d'une personne) sur la route, de changements d'état des vitres, des portes (« ouvertes - fermées »), etc.
Riz. 5. Cartes des champs de mines en représentation tridimensionnelle lors de prises de vue dans différentes polarisations : modèle (à droite), un exemple d'image d'une zone réelle de la surface terrestre avec un environnement souterrain complexe (à gauche), obtenue à l'aide d'un radar installé à bord d'un hélicoptère
Une autre capacité SAR intéressante, également annoncée par Sandia, est la vidéo radar. Dans ce mode, la formation discrète de l'ouverture de l'antenne de section en section, caractéristique du mode de levé continu, est remplacée par une formation multicanal parallèle. C'est-à-dire qu'à chaque instant, non pas une, mais plusieurs (le nombre dépend des tâches à résoudre) ouvertures sont synthétisées. Une sorte d’analogue au nombre d’ouvertures formées est la fréquence d’images lors de la prise de vue vidéo normale. Cette fonctionnalité vous permet de mettre en œuvre la sélection de cibles mobiles sur la base de l'analyse des images radar reçues, en appliquant les principes de détection cohérente, qui est intrinsèquement une alternative aux radars standards qui sélectionnent des cibles mobiles sur la base de l'analyse des fréquences Doppler dans le signal reçu. .
L'efficacité de la mise en œuvre de tels sélecteurs de cibles mobiles est hautement discutable en raison des coûts matériels et logiciels importants. De tels modes ne resteront donc probablement qu'un moyen élégant de résoudre le problème de sélection, malgré les opportunités émergentes de sélectionner des cibles se déplaçant à très faible vitesse. (moins de 3 km/h, ce qui n'est pas disponible pour le Doppler SDC). L'enregistrement vidéo direct dans la portée radar n'est pas non plus utilisé actuellement, encore une fois en raison d'exigences de performances élevées, il n'existe donc aucun modèle opérationnel d'équipement militaire mettant en œuvre ce mode dans la pratique.
Une suite logique de l'amélioration de la technologie d'arpentage de la surface de la Terre dans le domaine radar est le développement de sous-systèmes d'analyse des informations reçues. En particulier, le développement de systèmes d'analyse automatique d'images radar permettant de détecter, d'isoler et de reconnaître des objets au sol dans la zone d'étude devient important. La difficulté de créer de tels systèmes est liée au caractère cohérent des images radar, dont les phénomènes d'interférence et de diffraction conduisent à l'apparition d'artefacts - éblouissement artificiel, semblables à ceux qui apparaissent lors de l'irradiation d'une cible avec une grande surface de diffusion effective. De plus, la qualité de l'image radar est quelque peu inférieure à la qualité d'une image optique similaire (en termes de résolution). Tout cela conduit au fait qu'il n'existe pas actuellement de mises en œuvre efficaces d'algorithmes de reconnaissance d'objets dans les images radar, mais la quantité de travaux menés dans ce domaine, certains succès obtenus récemment, suggèrent que dans un avenir proche, il sera possible de parler sur les véhicules de reconnaissance intelligents sans pilote, capables d'évaluer la situation au sol sur la base des résultats de l'analyse des informations reçues par leur propre équipement de reconnaissance radar embarqué.
Une autre direction de développement est l'intégration, c'est-à-dire l'intégration coordonnée avec un traitement conjoint ultérieur d'informations provenant de plusieurs sources. Il peut s'agir de radars effectuant des relevés selon différents modes, ou de radars et autres moyens de reconnaissance (optique, IR, multispectral, etc.).
Ainsi, les radars modernes à ouverture d'antenne synthétique permettent de résoudre un large éventail de problèmes liés à la réalisation de relevés radar de la surface de la Terre, quelles que soient l'heure de la journée et les conditions météorologiques, ce qui en fait un moyen important d'obtenir des informations sur l'état. de la surface de la Terre et des objets qui s'y trouvent.
Pour commenter vous devez vous inscrire sur le site.
Radar à synthèse d'ouverture (SAR)- il s'agit d'une méthode qui permet d'obtenir des images radar de la surface terrestre et des objets qui s'y trouvent, quelles que soient les conditions météorologiques et le niveau d'éclairement naturel de la zone, avec des détails comparables aux photographies aériennes.
Caractéristiques d'obtention d'une image radar
Le moyen le plus simple d'obtenir une image radar (RL) d'une zone est d'utiliser le mode faisceau réel, lorsqu'un radar installé sur un avion porteur surveille la surface terrestre en balayant l'antenne dans un plan horizontal, par exemple dans un secteur de ±90° par rapport au vecteur vitesse porteur. Dans ce cas, l'image du terrain dans la zone de visualisation est observée sous la forme d'un secteur mesurant ±90° avec un rayon maximum égal à la portée radar. Le principal inconvénient de ce mode est la faible résolution en azimut, qui, lors d'un traitement incohérent, est déterminée par la largeur du diagramme de rayonnement (RP) de l'antenne réelle dans le plan horizontal. Largeur DN dépend de la taille horizontale de l'antenne (ouverture) et longueur d'onde des oscillations électromagnétiques émises par le radar : . Dans le même temps, la résolution linéaire en azimut augmente proportionnellement à la portée oblique. Par exemple, à la longueur d'onde cm et taille de l'antenne 150 cm largeur du faisceau ° et à une portée de 120 km la résolution linéaire sera d'environ 2,5 km. Une résolution aussi faible conduit au fait que seules les marques d'objets de grande taille (ponts, colonies, navires) sont observées sur l'image.
L'obtention d'une résolution azimutale élevée nécessite l'utilisation d'une antenne avec une grande ouverture. Placer de grandes antennes sur un avion est impossible, c'est pourquoi, pour assurer une résolution en azimut nettement meilleure que celle déterminée par la largeur du faisceau d'une antenne réelle, des modes de fonctionnement cohérents sont utilisés, qui permettent de former une ouverture synthétisée d'une plus grande (1000 ou plusieurs fois) taille.
L'essence du SAR
Donnez votre avis sur l'article "Synthèse d'ouverture radar"
Littérature
- Systèmes radar d'avions multifonctionnels. T.1. Le radar constitue la base d'informations pour les opérations de combat des avions multifonctionnels. Systèmes et algorithmes de traitement primaire des signaux radar / Ed. A.I. Kanashchenkova et V.I. Merkulova. - M. : Ingénierie radio, 2006. - 656 p. -ISBN5-88070-094-1.
- Kondratenkov, G.S. Radars d'étude de la Terre / G. S. Kondratenkov, V. S. Potekhin [etc.]. - M. : Radio et communication, 1983. - 272 p.
- Antipov, V.N. Stations radar avec synthèse numérique de l'ouverture de l'antenne / V. N. Antipov, V. T. Goryainov [etc.]. - M. : Radio et communication, 1988. - 304 p. - ISBN5-256-00019-5.
- Dudnik, P.I. Systèmes radar multifonctionnels : manuel. manuel pour les universités / P. I. Dudnik, A. R. Ilchuk [etc.]. - M. : Outarde, 2007. - 283 p. - ISBN978-5-358-00196-1.
- - 2010
- Bakhrakh L.D. Méthodes de mesure des paramètres des systèmes rayonnants en zone proche / Bakhrakh L.D - Leningrad : Nauka, 1985. - 272 p.
- Safronov G.S. Introduction à la radioholographie. - M. : Sov. radio, 1973. - 288 p.
Liens
Un extrait caractérisant la synthèse d'ouverture radar
Napoléon passa toute la journée du 25 août, comme disent ses historiens, à cheval, inspectant les environs, discutant des plans que lui présentaient ses maréchaux et donnant personnellement des ordres à ses généraux.
La ligne initiale des troupes russes le long de Kolocha a été rompue et une partie de cette ligne, à savoir le flanc gauche russe, a été repoussée à la suite de la prise de la redoute Chevardinsky le 24. Cette partie de la ligne n'était pas fortifiée, n'était plus protégée par le fleuve, et en face il n'y avait qu'une place plus ouverte et plus plate. Il était évident pour tout militaire et non militaire que les Français étaient censés attaquer cette partie de la ligne. Il semblait que cela ne nécessitait pas beaucoup de considérations, il n'y avait pas besoin de tels soins et de tels soucis de la part de l'empereur et de ses maréchaux, et il n'y avait pas du tout besoin de cette capacité particulière la plus élevée appelée génie, qu'ils aiment tant attribuer à Napoléon ; mais les historiens qui ont ensuite décrit cet événement, les gens qui entouraient alors Napoléon et lui-même pensaient différemment.
Napoléon traversa le terrain en voiture, examina pensivement la zone, secoua la tête en signe d'approbation ou d'incrédulité et, sans informer les généraux autour de lui du mouvement réfléchi qui guidait ses décisions, ne leur communiqua que les conclusions finales sous forme d'ordres. . Après avoir écouté la proposition de Davout, dit duc d'Ecmul, de contourner le flanc gauche russe, Napoléon déclara que cela n'était pas nécessaire, sans expliquer pourquoi ce n'était pas nécessaire. A la proposition du général Compan (qui était censé attaquer les bouffées d'eau) de diriger sa division à travers la forêt, Napoléon exprima son accord, malgré le fait que le soi-disant duc d'Elchingen, c'est-à-dire Ney, se permit de constater que les déplacements à travers la forêt étaient dangereux et pouvaient bouleverser la division.
Après avoir examiné la zone en face de la redoute Chevardinski, Napoléon réfléchit un moment en silence et montra les endroits où d'ici demain deux batteries devaient être installées pour opérer contre les fortifications russes, ainsi que les endroits où l'artillerie de campagne devait ensuite être alignée. pour eux.
Après avoir donné ces ordres et d'autres, il retourna à son quartier général, et la disposition de la bataille fut écrite sous sa dictée.
Cette disposition, dont parlent les historiens français avec délices et les autres historiens avec un profond respect, était la suivante :
« A l'aube, deux nouvelles batteries, construites dans la nuit, sur la plaine occupée par le prince d'Eckmuhl, ouvriront le feu sur les deux batteries ennemies adverses.
Au même moment, le chef d'artillerie du 1er corps, le général Pernetti, avec 30 canons de la division Compan et tous les obusiers des divisions Dessay et Friant, s'avancera, ouvrira le feu et bombardera à coups de grenades la batterie ennemie, contre qu'ils agiront !
24 canons d'artillerie de gardes,
30 canons de la division Compan
et 8 canons des divisions Friant et Dessay,
Total - 62 canons.
Le chef d'artillerie du 3e corps, le général Fouché, placera tous les obusiers des 3e et 8e corps, 16 au total, sur les flancs de la batterie chargée de bombarder la fortification de gauche, qui totalisera 40 canons contre il.
Le général Sorbier doit être prêt, au premier ordre, à marcher avec tous les obusiers de l'artillerie de la Garde contre l'une ou l'autre fortification.
Poursuivant la canonnade, le prince Poniatowski se dirigera vers le village, s'enfoncera dans la forêt et contournera la position ennemie.
Le Général Compan se déplacera à travers la forêt pour prendre possession de la première fortification.
En entrant ainsi dans la bataille, les ordres seront donnés en fonction des actions de l'ennemi.
La canonnade sur le flanc gauche commencera dès que se fera entendre la canonnade de l'aile droite. Les tirailleurs de la division Moran et de la division Vice-roi ouvraient un feu nourri lorsqu'ils voyaient le début de l'attaque de l'aile droite.
Le vice-roi prendra possession du village [de Borodine] et franchira ses trois ponts, suivit à la même hauteur des divisions Morand et Gérard, qui, sous sa direction, se dirigeront vers la redoute et entreront en ligne avec le reste de l'armée.